บ้าน
>
สินค้า > โมดูลค้นหาระยะด้วยเลเซอร์ > โมดูลต่อต้านเสียงพึมพำ > 2MRAD 1km Laser RangeFinder Module สำหรับ anti drone ststem







2MRAD 1km Laser RangeFinder Module สำหรับ anti drone ststem
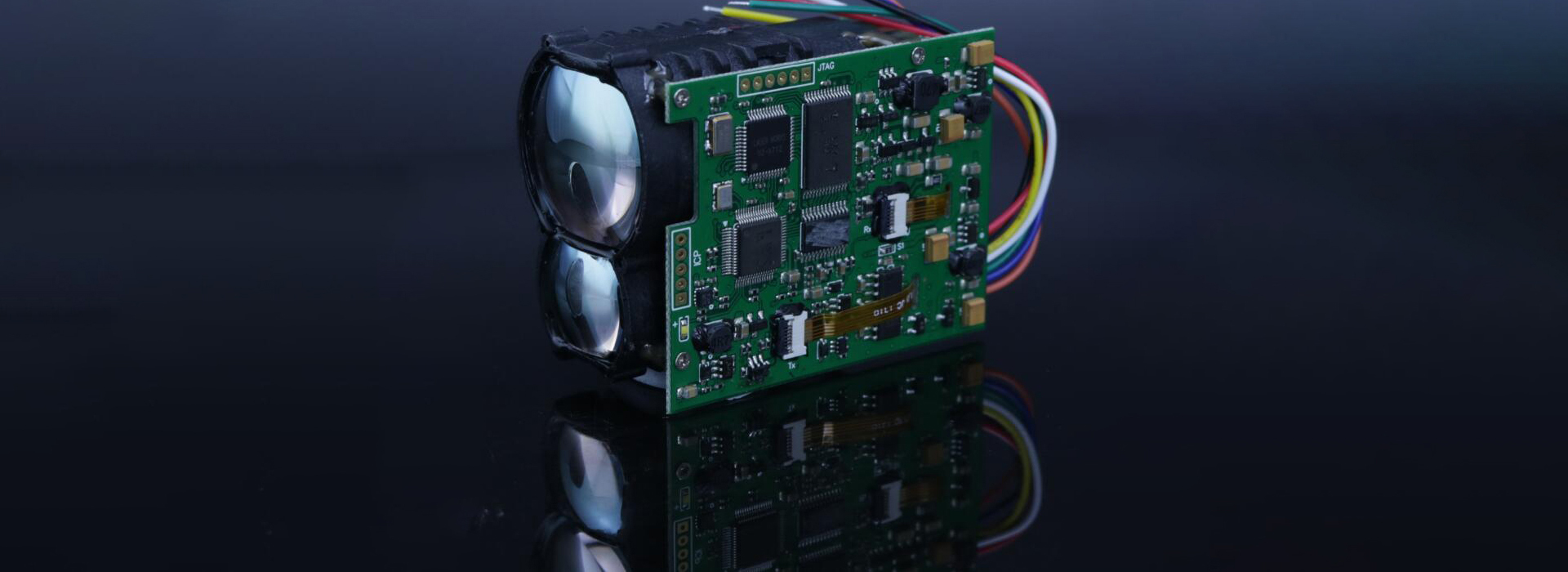
โมดูล RangeFinder Laser STA-WR1000X ขนาดกะทัดรัดเหมาะอย่างยิ่งสำหรับการรวมเข้ากับระบบป้องกันทางอากาศของกองทัพบกและกองทัพเรือ โมดูลการวัดระยะทางใช้เลเซอร์เออร์เบียมแก้วไดโอดขั้นสูงที่สุดซึ่งมีความพร้อมใช้งานสูงและมีค่าใช้จ่ายในการบำรุงรักษาต่ำ มุมแตกต่าง 2MRAD ของมันสามารถวัด UAVs ด้วยภาพตัดขวางที่ 0.1 ㎡สูงถึง 1,000 เมตรทำให้เป็นส่วนประกอบที่สำคัญของระบบต่อต้านเสียงพึมพำ
ส่งคำถาม
รายละเอียดสินค้า
1) การจัดเรียงเดี่ยวและต่อเนื่อง
2) การตอบสนองต่อคำสั่งเลเซอร์และหยุดตั้งแต่เวลาใดก็ได้ตามคำสั่งหยุด;
3) เอาท์พุทข้อมูลระยะทางและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ในระหว่างนั้น
4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสม (ไม่มีการสูญเสียพลังงานลง);
5) การเลือกระยะทางก่อนและหลังการบ่งชี้เป้าหมาย
6) ฟังก์ชั่นการทดสอบตัวเอง
2) การตอบสนองต่อคำสั่งเลเซอร์และหยุดตั้งแต่เวลาใดก็ได้ตามคำสั่งหยุด;
3) เอาท์พุทข้อมูลระยะทางและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ในระหว่างนั้น
4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสม (ไม่มีการสูญเสียพลังงานลง);
5) การเลือกระยะทางก่อนและหลังการบ่งชี้เป้าหมาย
6) ฟังก์ชั่นการทดสอบตัวเอง
ฟังก์ชั่นเลเซอร์หลากหลาย
ฟังก์ชั่นการฉายรังสีเลเซอร์;
ทริกเกอร์สัญญาณแยกโฟโต้อิเล็กทริก;
แยกลำแสงเล็ง
ฟังก์ชั่นทริกเกอร์ภายนอก
ฟังก์ชั่นการฉายรังสีเลเซอร์;
ทริกเกอร์สัญญาณแยกโฟโต้อิเล็กทริก;
แยกลำแสงเล็ง
ฟังก์ชั่นทริกเกอร์ภายนอก
ตัวบ่งชี้ทางเทคนิคหลัก
| ดัชนีแสง | |
| ความยาวคลื่น | 1535nm ± 5nm |
| มุมเบี่ยงเบนเลเซอร์ | ≤2mrad |
| รับรูรับแสงที่มีประสิทธิภาพ | 25 มม. |
| ความถี่ช่วง | เดี่ยว 1 ~ 10Hz ปรับได้ |
| พิสัย | ทัศนวิสัย≥ 12km, การสะท้อนแสงเป้าหมาย≥ 0.3, ความชื้น≤ 80%, ระยะทาง UAV (0.25m × 0.25m) ≥ 2km |
| ความแม่นยำ | ≤± 1m (RMS) |
| การวัดความแม่นยำ | ≥98% |
| อัตราการเตือนที่ผิดพลาด | ≤1% |
| ช่วงการวัดขั้นต่ำ | ≤30m |
| ความเสถียรของแกนเลเซอร์ | ≤0.05MRAD |
| แกนแสงนั้นขนานกับการอ้างอิงการติดตั้ง | ≤0.3MRAD |
| ตัวบ่งชี้เชิงกล | |
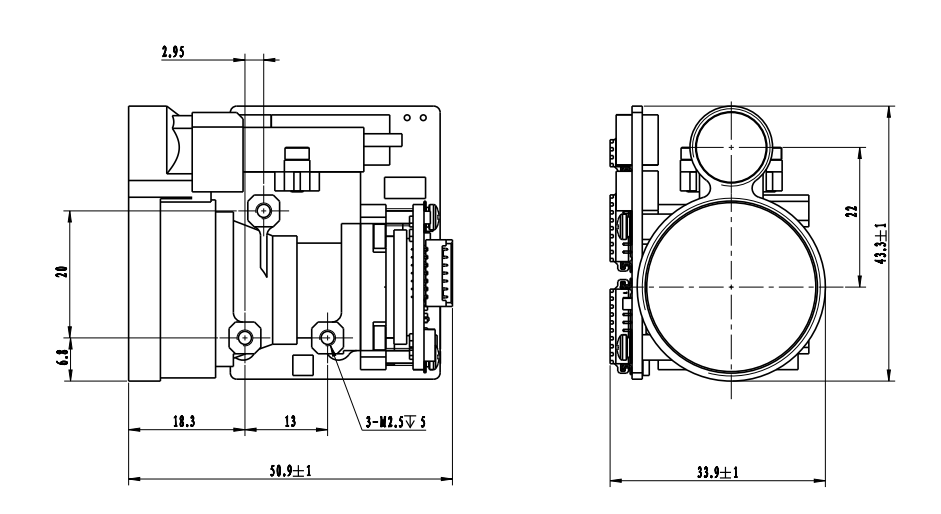
| ขนาด | ≤52มม. × 45 มม. × 35 มม. |
| น้ำหนัก | ≤75g |
| ตัวบ่งชี้ไฟฟ้า | |
| จัดหาไฟฟ้า | DC9V ~ 32V |
| การกระจายพลังงาน | ทำงานน้อยกว่า 3W@10Hz การใช้พลังงานสูงสุดน้อยกว่า 5W |
| ส่วนต่อประสาน | อินเตอร์เฟส RS422, 115200bps |
| พลังงานในอินเทอร์เฟซการควบคุม | เมื่อถึงระยะทางที่ปลอดภัยให้ใช้พลังงานและใช้งาน หรือในโหมดพลังงานต่ำเพื่อควบคุมสถานะการทำงาน |
| การคุ้มครองแผงวงจร | หลังจากการออกแบบและการดีบักของแผงวงจรเสร็จสมบูรณ์จะต้องเคลือบสีต่อต้านช็อตและทำการรักษา "การป้องกันสามครั้ง" |
| ความเหมาะสมด้านสิ่งแวดล้อม | |
| อุณหภูมิในการทำงาน | -40 ℃ -65 ℃ |
| อุณหภูมิการจัดเก็บ | -55 ℃ -70 ℃ |
| สั่น | GJB150.16 A-2009 "วิธีการทดสอบการทดสอบสิ่งแวดล้อมของห้องปฏิบัติการทางทหาร-การทดสอบการสั่นสะเทือน" |
| ขนตา | GJB150.18 A-2009 "การทดสอบวิธีการทดสอบสิ่งแวดล้อมของห้องปฏิบัติการทางทหาร" |
บันทึก:
1. คำอธิบายช่วงการเปลี่ยนแปลง: ช่วงจะเปลี่ยนไปภายใต้เงื่อนไขการทดสอบที่แตกต่างกันและเป้าหมายการทดสอบหากคุณตรวจพบเป้าหมายพิเศษโปรดติดต่อฝ่ายขายเพื่อยืนยัน
2. ช่วงความผันผวน: 30m-100m ความผันผวนขอแนะนำให้ใช้เวลา 50 เมตรหลังการใช้งานปกติ เนื่องจากพลังงานเลเซอร์มีขนาดใหญ่การใช้ระยะใกล้อาจทำให้ชิปตรวจจับได้ดังนั้นในการดีบักโปรดนำฝาครอบกระจกที่ดีเพื่อป้องกันไม่ให้ชิปตรวจจับถูกเผา
2. ช่วงความผันผวน: 30m-100m ความผันผวนขอแนะนำให้ใช้เวลา 50 เมตรหลังการใช้งานปกติ เนื่องจากพลังงานเลเซอร์มีขนาดใหญ่การใช้ระยะใกล้อาจทำให้ชิปตรวจจับได้ดังนั้นในการดีบักโปรดนำฝาครอบกระจกที่ดีเพื่อป้องกันไม่ให้ชิปตรวจจับถูกเผา
ไดอะแกรมโครงสร้างเครื่องจักรกล
ข้อกำหนดส่วนต่อประสานไฟฟ้า
อินเทอร์เฟซการสื่อสาร: rs422,115200bps, 1 บิตเริ่มต้น, 8 บิตข้อมูล, 1 หยุดบิต, ไม่มีความเท่าเทียมกัน;
ตารางที่ 2 คำจำกัดความบรรทัดอินเทอร์เฟซ
ตารางที่ 2 คำจำกัดความบรรทัดอินเทอร์เฟซ
| เข็มหมุด | คำนิยาม | การทำงาน | ข้อสังเกต |
| 1 | RX+ | RS422 ได้รับบวก |
|
| 2 | rx- | RS422 ได้รับเชิงลบ |
|
| 3 | tx- | RS422 ส่งเชิงลบ |
|
| 4 | TX+ | RS422 ส่งบวก |
|
| 5 | gnd |
|
|
| 6 | ม้วน | 9-32V |
|
| 7 | gnd |
|
|
| 8 | pwr_en | บังคับ | การควบคุมการนอนหลับ |
1. ข้อมูลอื่น ๆ
1) โมดูล STA-WR1000X ใช้เป็นพิเศษเพื่อวัดระยะทางของ UAV
2) ข้อมูลจำเพาะอาจได้รับการแก้ไขเป็นครั้งคราวโปรดยืนยันข้อกำหนดขนาดของผลิตภัณฑ์กับผู้ขายก่อนทำการสั่งซื้อ
3) โมดูลที่หลากหลายใช้โปรโตคอลการสื่อสารแบบครบวงจรและคอมพิวเตอร์ส่วนบน หากคุณต้องการโทรติดต่อโปรดติดต่อผู้ขาย
2. การสื่อสารโปรโตคอล
1) โปรโตคอลการส่ง: การสื่อสารอนุกรมแบบอะซิงโครนัส;
2) อัตราการรับส่งข้อมูล: 115200;
3) บิตข้อมูล: 10bits: หนึ่งบิตเริ่มต้น 8 บิตข้อมูล, 1 บิตหยุด, การตรวจสอบไม่ถูกต้อง;
4) โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์แรกส่วนคำสั่งความยาวข้อมูลส่วนพารามิเตอร์และไบต์ตรวจสอบ;
5) โหมดการสื่อสาร: ต้นแบบส่งคำสั่งควบคุมไปยังเครื่องที่หลากหลายและเครื่องที่ได้รับและดำเนินการตามคำแนะนำ ในสถานะที่หลากหลายเครื่องจักรที่มีการส่งข้อมูลและสถานะของเครื่องที่หลากหลายกลับไปที่คอมพิวเตอร์ส่วนบนตามวัฏจักรหลากหลาย รูปแบบการสื่อสารและเนื้อหาคำสั่งจะแสดงในตารางต่อไปนี้
a) การควบคุมหลักส่ง
รูปแบบของข้อความที่จะส่งมีดังนี้:
1) โมดูล STA-WR1000X ใช้เป็นพิเศษเพื่อวัดระยะทางของ UAV
2) ข้อมูลจำเพาะอาจได้รับการแก้ไขเป็นครั้งคราวโปรดยืนยันข้อกำหนดขนาดของผลิตภัณฑ์กับผู้ขายก่อนทำการสั่งซื้อ
3) โมดูลที่หลากหลายใช้โปรโตคอลการสื่อสารแบบครบวงจรและคอมพิวเตอร์ส่วนบน หากคุณต้องการโทรติดต่อโปรดติดต่อผู้ขาย
2. การสื่อสารโปรโตคอล
1) โปรโตคอลการส่ง: การสื่อสารอนุกรมแบบอะซิงโครนัส;
2) อัตราการรับส่งข้อมูล: 115200;
3) บิตข้อมูล: 10bits: หนึ่งบิตเริ่มต้น 8 บิตข้อมูล, 1 บิตหยุด, การตรวจสอบไม่ถูกต้อง;
4) โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์แรกส่วนคำสั่งความยาวข้อมูลส่วนพารามิเตอร์และไบต์ตรวจสอบ;
5) โหมดการสื่อสาร: ต้นแบบส่งคำสั่งควบคุมไปยังเครื่องที่หลากหลายและเครื่องที่ได้รับและดำเนินการตามคำแนะนำ ในสถานะที่หลากหลายเครื่องจักรที่มีการส่งข้อมูลและสถานะของเครื่องที่หลากหลายกลับไปที่คอมพิวเตอร์ส่วนบนตามวัฏจักรหลากหลาย รูปแบบการสื่อสารและเนื้อหาคำสั่งจะแสดงในตารางต่อไปนี้
a) การควบคุมหลักส่ง
รูปแบบของข้อความที่จะส่งมีดังนี้:
| STX0 | CMD | เลิร์น | data1h | data1l | CHK |
ตารางที่ 2 คำอธิบายรูปแบบของข้อความที่ส่ง
| หมายเลขสั่งซื้อ | ชื่อ | อธิบาย | รหัส | ข้อสังเกต |
| 1 | STX0 | ข้อความเริ่มต้นการตั้งค่าสถานะ | A5 (H) |
|
| 2 | CMD | CW | ดูตารางที่ 3 |
|
| 3 | เลิร์น | DL | จำนวนไบต์ทั้งหมดยกเว้นเครื่องหมายเริ่มต้นคำสั่งและการตรวจสอบ |
|
| 4 | เป็นดารา | พารามิเตอร์ | ดูตารางที่ 3 |
|
| 5 | การมาถึง |
|
||
| 6 | CHK | การตรวจสอบ XOR | ยกเว้นไบต์ที่ถูกต้องไบต์อื่น ๆ ทั้งหมดจะเป็น xored |
|
คำสั่งอธิบายดังนี้:
ตารางที่ 3 คำอธิบายของคำสั่งและคำข้อมูลที่ส่งโดยอาจารย์ไปยังเครื่องที่หลากหลาย
ตารางที่ 3 คำอธิบายของคำสั่งและคำข้อมูลที่ส่งโดยอาจารย์ไปยังเครื่องที่หลากหลาย
| หมายเลขสั่งซื้อ | CW | การทำงาน | ไบต์ข้อมูล | ข้อสังเกต | ความยาว | รหัสตัวอย่าง |
| 1 | 0x00 | หยุด | datah = 00 (h) datal = 00 (h) | Rangefinder หยุดการวัด | หกไบต์ | A5 00 02 00 A7 |
| 2 | 0x01 | เดี่ยว | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 01 02 00 00 A6 |
| 3 | 0x02 | อย่างต่อเนื่อง | datah = xx (h) datal = yy (h) | ข้อมูลอธิบายช่วงเวลาที่หลากหลายใน MS | หกไบต์ | A5 02 02 03 E8 4E (1Hz ตั้งแต่) |
| 4 | 0x03 | การตรวจสอบตนเอง | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 02 02 00 A4 |
| 5 | 0x04 | ตั้งระยะทางที่ใกล้เคียงที่สุดกับการเลือก | datah = xx (h) datal = yy (h) | ข้อมูลอธิบายค่าโซนตาบอดหน่วย 1m | หกไบต์ | A5 04 02 00 64 C7 (100m เป็นระยะทางที่ใกล้ที่สุด) |
| 6 | 0x06 | จำนวนคิวรีไฟที่เพิ่มขึ้น | datah = 00 (h) datal = 00 (h) | จำนวนคิวรีไฟที่เพิ่มขึ้น | หกไบต์ | A5 06 02 00 A1 |
| 7 | 0x11 | พลังงาน APD เปิดอยู่ | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 11 02 00 B6 |
| 8 | 0x12 | พลังงาน APD ปิดอยู่ | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 12 02 00 B5 |
| 9 | 0xeb | แบบสอบถามหมายเลข | datah = 00 (h) datal = 00 (h) | แบบสอบถามหมายเลข | หกไบต์ | A5 EB 02 00 00 4C |
b) การควบคุมหลักได้รับรูปแบบ
รูปแบบของข้อความที่ได้รับมีดังนี้:
รูปแบบของข้อความที่ได้รับมีดังนี้:
| STX0 | CMD | เลิร์น | ข้อมูล | วันที่ 0 | CHK |
ตารางที่ 4 คำอธิบายรูปแบบของข้อความที่ได้รับ
| หมายเลขสั่งซื้อ | ชื่อ | อธิบาย | รหัส | ข้อสังเกต |
| 1 | STX0 | ข้อความเริ่มต้นธง 1 | A5 (H) |
|
| 2 | cmd_jg | คำสั่งข้อมูล | ดูตารางที่ 5 |
|
| 3 | เลิร์น | DL | จำนวนไบต์ทั้งหมดยกเว้นเครื่องหมายเริ่มต้นคำสั่งและการตรวจสอบ |
|
| 4 | DN | พารามิเตอร์ | ดูตารางที่ 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | การตรวจสอบ XOR | ยกเว้นไบต์ที่ถูกต้องไบต์อื่น ๆ ทั้งหมดจะเป็น xored |
|
คำอธิบายสถานะการควบคุมหลักการควบคุม:
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดย RangeFinder ไปยังตัวควบคุมหลัก
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดย RangeFinder ไปยังตัวควบคุมหลัก
| หมายเลขสั่งซื้อ | CW | การทำงาน | ไบต์ข้อมูล | ข้อสังเกต | ความยาวโดยรวม |
| 1 | 0x00 | หยุด | d1 = 00 (h) d0 = 00 (h) |
|
หกไบต์ |
| 2 | 0x03 | การตรวจสอบตนเอง | d8 ~ d1 | D8-D7: -5V แรงดันไฟฟ้า, หน่วย 0.01V.D6-D5: ค่าสปอตตาบอด, หน่วย 1MD4: ค่าแรงดันไฟฟ้าสูง APD, หน่วย V; D3: ชนิดถ่าน, อุณหภูมิ APD, หน่วย: องศาเซลเซียส; D2-D1: +5V แรงดันไฟฟ้า, หน่วย 0.01V | 12 ไบต์ |
| 3 | 0x04 | ระยะทางไปยังการตั้งค่าการเข้าถึงที่ใกล้ที่สุดหน่วย M | D1 D0 | ข้อมูลอธิบายค่าระยะทางที่ใกล้ที่สุดหน่วย 1m เริ่มสูงและสิ้นสุดต่ำ | หกไบต์ |
| 4 | 0x06 | จำนวนคิวรีไฟที่เพิ่มขึ้น | d3 ~ d0 | ข้อมูลเป็นการแสดงออกถึงจำนวนแสงที่ปล่อยออกมา 4 ไบต์โดยมีไบต์สูงก่อน | เจ็ดไบต์ |
| 5 | 0x11 | พลังงาน APD เปิดอยู่ | d1 = 00 (h) d0 = 00 (h) | พลังงาน APD เปิดอยู่ | หกไบต์ |
| 6 | 0x12 | APD Power ปิด | d1 = 00 (h) d0 = 00 (h) | APD Power ปิด | หกไบต์ |
| 7 | 0xed | ทำงานล่วงเวลา | 0x00 0x00 | เลเซอร์อยู่ภายใต้การป้องกันการทำงานด้วยเลเซอร์และไม่สามารถวัดได้ | หกไบต์ |
| 8 | 0xee | ข้อผิดพลาดประสิทธิผล | 0x00 0x00 |
|
หกไบต์ |
| 9 | 0xef | หมดเวลาการสื่อสารพอร์ตอนุกรม | 0x00 0x00 |
|
หกไบต์ |
| 10 | 0x01 | การวัดช่วงเดียว (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | ระยะทางเป้าหมายแรก D8-D6 (หน่วย 0.1m) ระยะทาง D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1m) D2-D0 ระยะทางเป้าหมายที่สาม (หน่วย 0.1m) 3 เป้าหมายมาจากใกล้กับ FARD9 (BIT7-BIT0) BYTE: D9 เป็นบิตที่ 7 เพื่อระบุคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 คือตำแหน่งที่ 6 ที่บ่งบอกถึงเสียงสะท้อน; 1: มี echo, 0: ไม่มี echod9 ตำแหน่งที่ห้าระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: เลเซอร์ faultD9 เป็นบิตที่สี่ของธงหมดเวลา, 1: ปกติ, 0: TimeOutD9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1); D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ 0: Errord9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้านี้ 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) .D9 บิต 0th ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายหลังจากเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 11 | 0x02 | การจัดเรียงอย่างต่อเนื่อง (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9 D8 D7 D6D5 D4D2 D1 D0 | ระยะทางเป้าหมายแรก D8-D6 (หน่วย 0.1m) ระยะทาง D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1m) D2-D0 ระยะทางเป้าหมายที่สาม (หน่วย 0.1m) 3 เป้าหมายมาจากใกล้กับ FARD9 (BIT7-BIT0) BYTE: D9 เป็นบิตที่ 7 เพื่อระบุคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 คือตำแหน่งที่ 6 ที่บ่งบอกถึงเสียงสะท้อน; 1: มี echo, 0: ไม่มี echod9 บิตที่ 5 ระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: เลเซอร์ faultD9 เป็นบิตที่สี่ของธงหมดเวลา, 1: ปกติ, 0: TimeOutD9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1); D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ 0: Errord9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้านี้ 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) .D9 บิต 0th ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายหลังจากเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 12 | 0xeb | แบบสอบถามหมายเลข | D17 …… D0 | D17 D16 D15 D14 D13 D12 Whole Machine Model Coded11D10 Product NumberD9 D6 Software VersionD5 D4 APD NumberD3 D2 Laser NumberVersion D1 ของ FPGA | 22 ไบต์ |
| หมายเหตุ: ①ข้อมูลที่ไม่ได้กำหนดไบต์/บิตค่าเริ่มต้นคือ 0; | |||||
แท็กยอดนิยม: 2MRAD 1km Laser Rangefinder Module สำหรับระบบต่อต้านเสียงพึมพำผู้ผลิตซัพพลายเออร์โรงงานประเทศจีนผลิตในประเทศจีนปรับแต่งคุณภาพสูงและปรับแต่งคุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร
โมดูลค้นหาระยะเลเซอร์ 1535nm
โมดูลค้นหาระยะเลเซอร์ 1570nm
โมดูล Rangefinder เลเซอร์ 1.54um
ตัวออกแบบเป้าหมายเลเซอร์ 1064nm
โมดูลต่อต้านเสียงพึมพำ
โมดูล Lidar แบบต่างๆ
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง