บ้าน
>
สินค้า > โมดูลค้นหาระยะด้วยเลเซอร์ > โมดูล Lidar แบบต่างๆ > 100Hz 10m ToF โมดูล Lidar แบบจุดเดียว





100Hz 10m ToF โมดูล Lidar แบบจุดเดียว
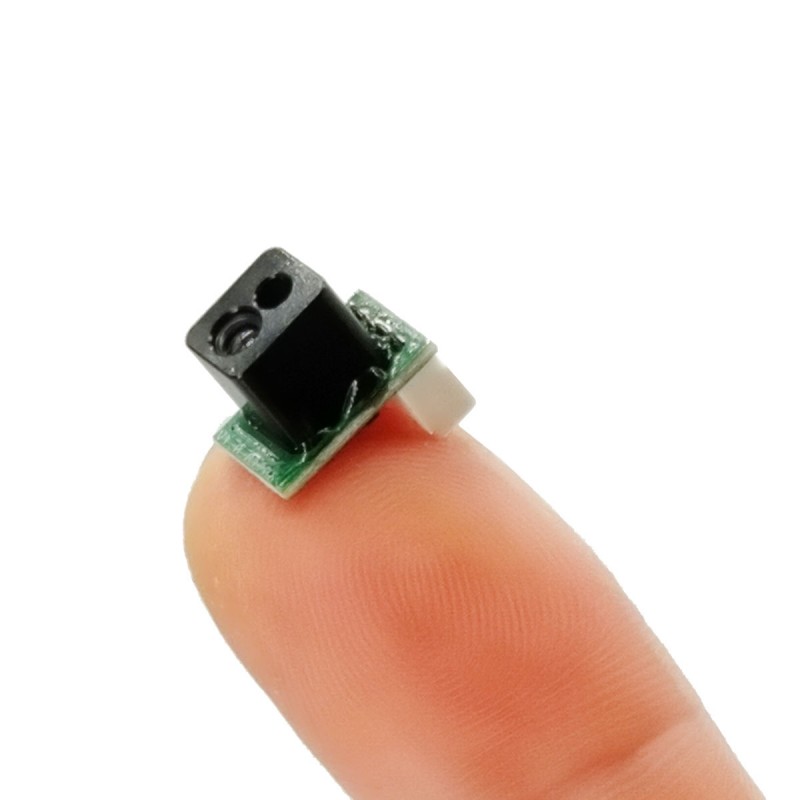
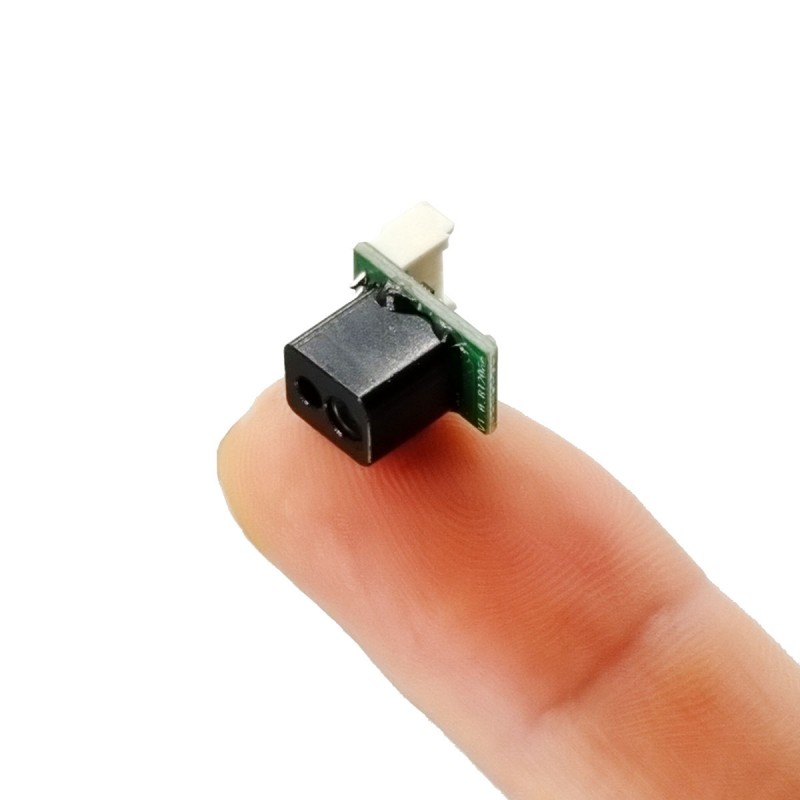
เรดาร์วัดระยะด้วยเลเซอร์ STA-B10X เป็นโมดูลวัดระยะด้วยเลเซอร์ใหม่ที่บริษัทของเราเปิดตัวสำหรับสาขาต่างๆ เช่น โดรน หุ่นยนต์ทำความสะอาดพื้น และหุ่นยนต์อุตสาหกรรม ผลิตภัณฑ์นี้ใช้หลักการ DTOF (Direct Time Of Flight) และมีขนาดเล็ก ต้นทุนต่ำ ประสิทธิภาพการทำงานที่มั่นคง และทนทานต่อการรบกวนของแสงได้ดี ผลิตภัณฑ์นี้ใช้งานง่าย ยืดหยุ่นในการติดตั้ง และมีชุดคำสั่งการสื่อสารและคอมพิวเตอร์ส่วนบน ทำให้สะดวกสำหรับการพัฒนาขั้นที่สองและคุ้มต้นทุนสูง
ส่งคำถาม ดาวน์โหลด PDF
รายละเอียดสินค้า
การควบคุมความสูงของโดรนและการหลีกเลี่ยงสิ่งกีดขวาง
การหลีกเลี่ยงอุปสรรคของหุ่นยนต์
ม่านแสงเกรดอุตสาหกรรม
การหลีกเลี่ยงสิ่งกีดขวาง AGV/UAV
การวัดความเร็วสูงและการตรวจสอบความปลอดภัยในด้านการขนส่งและระบบอัตโนมัติทางอุตสาหกรรม
การหลีกเลี่ยงอุปสรรคของหุ่นยนต์
ม่านแสงเกรดอุตสาหกรรม
การหลีกเลี่ยงสิ่งกีดขวาง AGV/UAV
การวัดความเร็วสูงและการตรวจสอบความปลอดภัยในด้านการขนส่งและระบบอัตโนมัติทางอุตสาหกรรม
พารามิเตอร์โดยละเอียดของผลิตภัณฑ์
| หมายเลขคำสั่งซื้อ | แบบอย่าง | STA-B10X |
| 1 | ตั้งแต่ | 0.03-5 ม.(การสะท้อนแสง 10%), 0.03-10 ม.(การสะท้อนแสง 90%) |
| 2 | หลุมช่วง | 3ซม |
| 2 | ช่วงความถี่ | 100เฮิร์ต |
| 3 | ความแม่นยำตั้งแต่ | 1% |
| 4 | ความแม่นยำในการทำซ้ำ | ±10มม |
|
|
อัตราส่วนความละเอียด | 1 มม |
| 5 | ความต้านทานต่อแสงจากสิ่งแวดล้อม | 100,000 ลักซ์ |
| 6 | ความยาวคลื่นเลเซอร์ | 905 นาโนเมตร |
| 7 | ระดับเลเซอร์ | คลาส 1 |
| 8 | มุมของสนาม | 3° |
| 9 | ระบุความยาวคลื่นเลเซอร์ | ไม่มี |
| 10 | ระบุระดับเลเซอร์ | ไม่มี |
| 11 | แรงดันไฟฟ้าขาเข้า | 3.3V |
| 12 | จุดพีคปัจจุบัน | ไม่มี |
| 13 | กระแสไฟฟ้าเฉลี่ย | ไม่มี |
| 14 | การใช้พลังงานโดยเฉลี่ย | 0.4W |
| 15 | โหมดการสื่อสาร | UART TTL |
| 16 | ระดับการป้องกัน | ไม่มี |
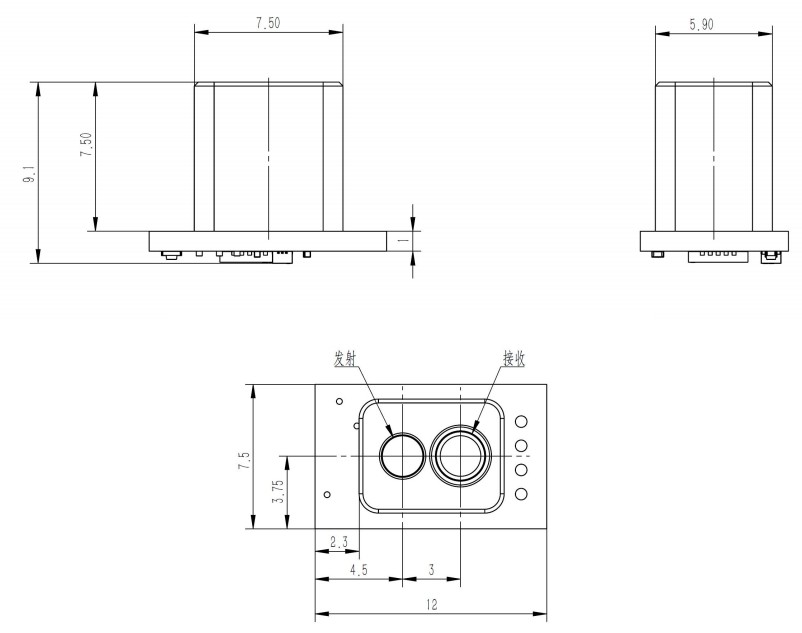
| 17 | ขนาด (ยาว x กว้าง x สูง) | 12x9x8.5มม |
| 18 | น้ำหนัก | 1ก |
| 19 | อุณหภูมิในการทำงาน | -30°C~+65°C |
| 20 | ข้อมูลจำเพาะของสายเคเบิล | ขั้วต่อ 4 พิน 1.25 มม., สายหลวมกระป๋อง 10 ซม |
| 21 | ขอบเขตการปรับแต่ง | รองรับการปรับแต่งโครงสร้างภายนอก แรงดันไฟฟ้าอินพุต และโปรโตคอลเอาท์พุต |
คำจำกัดความของพิน

|
||
| เข็มหมุด | กำหนด/สีลวด | ส่วนติดต่อผู้ใช้ |
| 1 | ไม่มี | รับ |
| 2 | RX (สีดำ) | เท็กซัส |
| 3 | GND (สีเหลือง) | แหล่งจ่ายไฟ - |
| 4 | 3.3V (สีเขียว) | แหล่งจ่ายไฟ + |
ขนาดโมดูล
โปรโตคอลการสื่อสาร
อินเตอร์เฟซการสื่อสาร
| ยูอาร์ที | |
| อัตราเริ่มต้น | 460800 (ปรับได้) |
| บิตข้อมูล | 8 |
| หยุดสักหน่อย | 1 |
| เช็คเลขคู่ | ไม่มี |
รูปแบบเอาต์พุต
ข้อมูลเอาต์พุตที่ใช้งานโมดูลการวัดระยะทางหลังจากเปิดเครื่อง (ข้อมูล 4 ไบต์ในหนึ่งเฟรม) เอาต์พุต 65535 เมื่อไม่สามารถวัดได้
ตัวอย่าง: 5C 02 11 EC
5C: ส่วนหัวของเฟรมคงที่ 1 ไบต์
02 11: สองไบต์เพื่อระบุว่าระยะการวัด 4354 มม. ปลายเล็กของโหมดช่วง 0-65535 มม.
EC: จากจุดเริ่มต้นของ 02 ถึงจุดสิ้นสุดของ 11 เพื่อทำการบวกของเช็คซัมเพื่อหาค่าผกผันของหนึ่งไบต์
ฟังก์ชันเช็คซัม: (เริ่มจากไบต์ที่สองไปจนถึงจุดสิ้นสุดของไบต์สุดท้าย รวมและกลับด้าน)
uint8_t Check_Sum (uint8_t * _pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t ฉัน;
สำหรับ(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_sum = (~cmd_sum);
กลับ cmd_sum;
}
ตัวอย่าง: 5C 02 11 EC
5C: ส่วนหัวของเฟรมคงที่ 1 ไบต์
02 11: สองไบต์เพื่อระบุว่าระยะการวัด 4354 มม. ปลายเล็กของโหมดช่วง 0-65535 มม.
EC: จากจุดเริ่มต้นของ 02 ถึงจุดสิ้นสุดของ 11 เพื่อทำการบวกของเช็คซัมเพื่อหาค่าผกผันของหนึ่งไบต์
ฟังก์ชันเช็คซัม: (เริ่มจากไบต์ที่สองไปจนถึงจุดสิ้นสุดของไบต์สุดท้าย รวมและกลับด้าน)
uint8_t Check_Sum (uint8_t * _pbuff, uint16_t _cmdLen)
{
uint8_t cmd_sum=0;
uint16_t ฉัน;
สำหรับ(i=0;i<_cmdLen;i++)
{
cmd_sum += _pbuff[i];
}
cmd_sum = (~cmd_sum);
กลับ cmd_sum;
}
ข้อควรระวังในการใช้งาน
ฟังก์ชันเช็คซัม: (เริ่มจากไบต์ที่สองไปจนถึงจุดสิ้นสุดของไบต์สุดท้าย รวมและกลับด้าน)
- เลเซอร์ผลิตภัณฑ์อยู่ใน Class1 โปรดอย่ามองที่เลนส์โดยตรงหลังจากเปิดเครื่องแล้ว
- เมื่อใช้ในสภาพแวดล้อมที่มีฝุ่น แนะนำให้เพิ่มกระจกโปร่งแสงสีแดงหรือแผงอะคริลิกด้านนอกเลนส์ของผลิตภัณฑ์ (ด้วยอัตราการส่งผ่านไม่น้อยกว่า 85% ที่แถบความยาวคลื่น 905 นาโนเมตร)
- เมื่อสัมผัสผลิตภัณฑ์กรุณาสวมถุงมือป้องกันไฟฟ้าสถิตย์เพื่อหลีกเลี่ยงไม่ให้ผลิตภัณฑ์เสียหาย
- ผลิตภัณฑ์จะไม่มีประสิทธิภาพในการวัดความเสี่ยงของความล้มเหลวเมื่อทำการวัดวัตถุที่มีการสะท้อนแสงสูง (เช่น เทป 3M) กระจก ฯลฯ
- เลเซอร์ผลิตภัณฑ์อยู่ใน Class1 โปรดอย่ามองที่เลนส์โดยตรงหลังจากเปิดเครื่องแล้ว
- เมื่อใช้ในสภาพแวดล้อมที่มีฝุ่น แนะนำให้เพิ่มกระจกโปร่งแสงสีแดงหรือแผงอะคริลิกด้านนอกเลนส์ของผลิตภัณฑ์ (ด้วยอัตราการส่งผ่านไม่น้อยกว่า 85% ที่แถบความยาวคลื่น 905 นาโนเมตร)
- เมื่อสัมผัสผลิตภัณฑ์กรุณาสวมถุงมือป้องกันไฟฟ้าสถิตย์เพื่อหลีกเลี่ยงไม่ให้ผลิตภัณฑ์เสียหาย
- ผลิตภัณฑ์จะไม่มีประสิทธิภาพในการวัดความเสี่ยงของความล้มเหลวเมื่อทำการวัดวัตถุที่มีการสะท้อนแสงสูง (เช่น เทป 3M) กระจก ฯลฯ
แท็กยอดนิยม: 100Hz 10m ToF โมดูล LIDAR แบบจุดเดียว, ผู้ผลิต, ซัพพลายเออร์, โรงงาน, จีน, ผลิตในประเทศจีน, ปรับแต่ง, คุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร
โมดูลค้นหาระยะเลเซอร์ 1535nm
โมดูลค้นหาระยะเลเซอร์ 1570nm
โมดูล Rangefinder เลเซอร์ 1.54um
ตัวออกแบบเป้าหมายเลเซอร์ 1064nm
โมดูลต่อต้านเสียงพึมพำ
โมดูล Lidar แบบต่างๆ
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง