บ้าน
>
สินค้า > โมดูลค้นหาระยะด้วยเลเซอร์ > โมดูลต่อต้านเสียงพึมพำ > โมดูลวัดระยะด้วยเลเซอร์ 2mrad 2km สำหรับระบบป้องกันโดรน








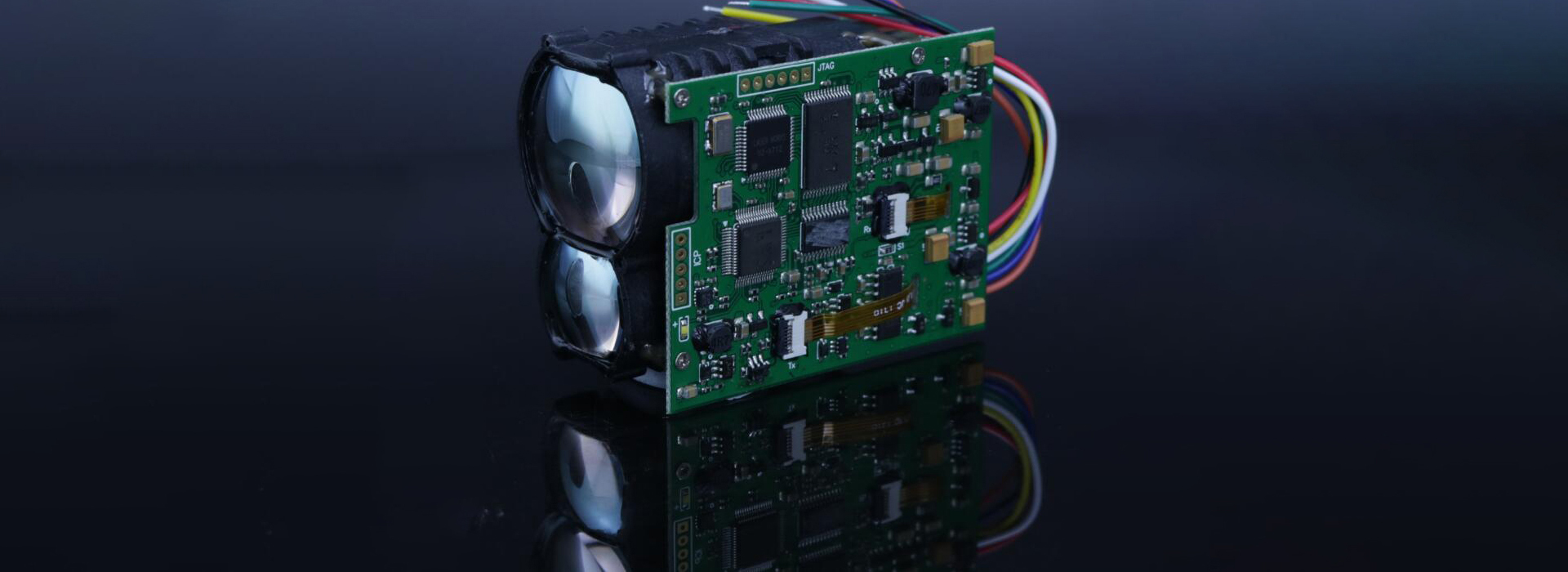
โมดูลวัดระยะด้วยเลเซอร์ 2mrad 2km สำหรับระบบป้องกันโดรน
โมดูลวัดระยะด้วยเลเซอร์ STA-WR2000X ขนาดกะทัดรัดเหมาะอย่างยิ่งสำหรับการบูรณาการเข้ากับระบบป้องกันภัยทางอากาศของกองทัพบกและกองทัพเรือ โมดูลการวัดระยะทางใช้เลเซอร์แก้วเออร์เบียมแบบปั๊มไดโอดที่ทันสมัยที่สุด ซึ่งมีความพร้อมใช้งานสูงและค่าบำรุงรักษาต่ำ มุมเบี่ยงเบน 2 เมตรของมันสามารถวัด UAV ด้วยพื้นที่หน้าตัด 0.1 ตร.ม. สูงถึง 2,000 เมตร ทำให้เป็นองค์ประกอบสำคัญของระบบต่อต้านโดรน
ส่งคำถาม
รายละเอียดสินค้า
1) ตั้งแต่เดี่ยวและต่อเนื่อง
2) ตอบสนองต่อคำสั่งช่วงเลเซอร์และการหยุดช่วงได้ตลอดเวลาตามคำสั่งหยุด
3) ส่งข้อมูลระยะทางและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ระหว่างช่วง;
4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสมได้ (ไม่มีการสูญเสียพลังงานลง)
5) การเลือกระยะทาง ก่อนและหลังการบ่งชี้เป้าหมาย
6) ฟังก์ชั่นการทดสอบตัวเอง
2) ตอบสนองต่อคำสั่งช่วงเลเซอร์และการหยุดช่วงได้ตลอดเวลาตามคำสั่งหยุด
3) ส่งข้อมูลระยะทางและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ระหว่างช่วง;
4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสมได้ (ไม่มีการสูญเสียพลังงานลง)
5) การเลือกระยะทาง ก่อนและหลังการบ่งชี้เป้าหมาย
6) ฟังก์ชั่นการทดสอบตัวเอง
| ดัชนีแสง | |
| ความยาวคลื่น | 1535 นาโนเมตร ± 5 นาโนเมตร |
| มุมไดเวอร์เจนซ์ของเลเซอร์ | ≤2mrad |
| รูรับแสงรับที่มีประสิทธิภาพ | 56มม |
| ช่วงความถี่ | เดี่ยว, 1 ~ 10Hz ปรับได้ |
| พิสัย | ทัศนวิสัย ≥ 12 กม. การสะท้อนเป้าหมาย ≥ 0.3 ความชื้น ≤ 80% ระยะห่างของ UAV (0.25 ม. × 0.25 ม.) ≥ 2 กม. |
| ความแม่นยำตั้งแต่ | ≤±1ม.(RMS) |
| การวัดความแม่นยำ | ≥98% |
| อัตราการเตือนที่ผิดพลาด | ≤1% |
| ช่วงการวัดขั้นต่ำ | ≤50ม |
| ความเสถียรของแกนเลเซอร์ | ≤0.05 มราด |
| แกนลำแสงขนานกับจุดอ้างอิงการติดตั้ง | ≤0.3mrad |
| ตัวชี้วัดทางกล | |
| ขนาด | ≤90×63×82มม |
| น้ำหนัก | ≤300ก |
| ตัวชี้วัดทางไฟฟ้า | |
| จ่ายไฟฟ้า | กระแสตรง9V~32V |
| การกระจายพลังงาน | ทำงานน้อยกว่า 3W@10Hz การใช้พลังงานสูงสุดน้อยกว่า 5W |
| อินเทอร์เฟซ | อินเทอร์เฟซ RS422, 115200bps |
| เปิดอินเทอร์เฟซการควบคุม | เมื่อถึงระยะที่ปลอดภัยแล้ว ให้เปิดเครื่องและใช้งาน หรือในโหมดพลังงานต่ำเพื่อควบคุมสถานะการทำงาน |
| การป้องกันแผงวงจร | หลังจากการออกแบบและการแก้จุดบกพร่องของแผงวงจรเสร็จสิ้นแล้ว จะต้องเคลือบสีป้องกันการกระแทกและทำการรักษา "การป้องกันสามประการ" |
| ความเหมาะสมด้านสิ่งแวดล้อม | |
| อุณหภูมิในการทำงาน | -40°C-65°C |
| อุณหภูมิในการจัดเก็บ | 12 ไบต์ |
| สั่น | GJB150.16 A-2009 "วิธีทดสอบสภาพแวดล้อมในห้องปฏิบัติการอุปกรณ์ทางทหาร - การทดสอบการสั่นสะเทือน" |
| ขนตา | GJB150.18 A-2009 "การทดสอบสภาพแวดล้อมในห้องปฏิบัติการอุปกรณ์ทางทหาร - การทดสอบแรงกระแทก" |
บันทึก:
1. คำอธิบายช่วงตั้งแต่: ช่วงจะเปลี่ยนไปภายใต้เงื่อนไขการทดสอบและเป้าหมายการทดสอบที่แตกต่างกัน หากคุณตรวจพบเป้าหมายพิเศษ โปรดติดต่อฝ่ายขายเพื่อยืนยัน
2. ช่วงขั้นต่ำ: ความผันผวน 30 ม. - 100 ม. แนะนำให้ 50 ม. หลังจากการใช้งานปกติ เนื่องจากพลังงานเลเซอร์มีขนาดใหญ่ การใช้ระยะใกล้อาจทำให้ชิปตรวจจับไหม้ ดังนั้นในการดีบัก โปรดนำฝาครอบกระจกที่ดีมาด้วย เพื่อป้องกันไม่ให้ชิปตรวจจับไหม้
1. คำอธิบายช่วงตั้งแต่: ช่วงจะเปลี่ยนไปภายใต้เงื่อนไขการทดสอบและเป้าหมายการทดสอบที่แตกต่างกัน หากคุณตรวจพบเป้าหมายพิเศษ โปรดติดต่อฝ่ายขายเพื่อยืนยัน
2. ช่วงขั้นต่ำ: ความผันผวน 30 ม. - 100 ม. แนะนำให้ 50 ม. หลังจากการใช้งานปกติ เนื่องจากพลังงานเลเซอร์มีขนาดใหญ่ การใช้ระยะใกล้อาจทำให้ชิปตรวจจับไหม้ ดังนั้นในการดีบัก โปรดนำฝาครอบกระจกที่ดีมาด้วย เพื่อป้องกันไม่ให้ชิปตรวจจับไหม้
แผนภาพโครงสร้างทางกล

อินเทอร์เฟซภายนอก
| เข็มหมุด | คำนิยาม | การทำงาน | หมายเหตุ |
| 1 | อาร์เอ็กซ์+ | ตัวรับ RS422 + | สีฟ้า |
| 2 | รับ- | ตัวรับ RS422 - | สีเขียว |
| 3 | เท็กซัส- | ระบบส่งกำลัง RS422 - | สีม่วง |
| 4 | เท็กซัส+ | ระบบส่งกำลัง RS422 + | สีเหลือง |
| 5 | จีเอ็นดี | สายดินสื่อสาร | สีขาว |
| 6 | วี | แหล่งจ่ายไฟ + | สีแดง |
| 7 | จีเอ็นดี | แหล่งจ่ายไฟ - | สีดำ |
| 8 | PWR TH | / | เถ้า |
โมดูลกำหนดระยะเลเซอร์ OEM/ODM 1-15 กม. สำหรับระบบทางอากาศไร้คนขับแบบตอบโต้ (C-UAS)
โปรโตคอลการสื่อสาร
1. โปรโตคอลการรับส่งข้อมูล: การสื่อสารแบบอนุกรมแบบอะซิงโครนัส;
2. อัตราพอร์ต: 115200;
3. บิตข้อมูล: 10 บิต: หนึ่งบิตเริ่มต้น, 8 บิตข้อมูล, หนึ่งบิตหยุด, การตรวจสอบที่ไม่ถูกต้อง;
4. โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์ส่วนหัว ส่วนคำสั่ง ความยาวข้อมูล ส่วนพารามิเตอร์ และไบต์ตรวจสอบ
1. คำอธิบายช่วงตั้งแต่: ช่วงจะเปลี่ยนไปภายใต้เงื่อนไขการทดสอบและเป้าหมายการทดสอบที่แตกต่างกัน หากคุณตรวจพบเป้าหมายพิเศษ โปรดติดต่อฝ่ายขายเพื่อยืนยัน
A) การควบคุมหลักส่ง
2. อัตราพอร์ต: 115200;
3. บิตข้อมูล: 10 บิต: หนึ่งบิตเริ่มต้น, 8 บิตข้อมูล, หนึ่งบิตหยุด, การตรวจสอบที่ไม่ถูกต้อง;
4. โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์ส่วนหัว ส่วนคำสั่ง ความยาวข้อมูล ส่วนพารามิเตอร์ และไบต์ตรวจสอบ
1. คำอธิบายช่วงตั้งแต่: ช่วงจะเปลี่ยนไปภายใต้เงื่อนไขการทดสอบและเป้าหมายการทดสอบที่แตกต่างกัน หากคุณตรวจพบเป้าหมายพิเศษ โปรดติดต่อฝ่ายขายเพื่อยืนยัน
A) การควบคุมหลักส่ง
รูปแบบของข้อความที่จะส่งมีดังนี้:
| STX0 | ซีเอ็มดี | เลน | DATA1H | DATA1L | ซีเอชเค |
ตารางที่ 2 รูปแบบคำอธิบายของข้อความที่ส่ง
| หมายเลขคำสั่งซื้อ | ชื่อ | อธิบาย | รหัส | หมายเหตุ |
| 1 | STX0 | แฟล็กเริ่มต้นข้อความ | A5(ส) |
|
| 2 | ซีเอ็มดี | ซีดับบลิว | ดูตารางที่ 3 |
|
| 3 | เลน | ดล | จำนวนไบต์ทั้งหมด ยกเว้นเครื่องหมายเริ่มต้น คำคำสั่ง และผลรวมตรวจสอบ |
|
| 4 | ดาต้าห์ | พารามิเตอร์ | ดูตารางที่ 3 |
|
| 5 | การมาถึง |
|
||
| 6 | ซีเอชเค | การตรวจสอบแฮคเกอร์ | ยกเว้นไบต์ที่ถูกต้อง ไบต์อื่นๆ ทั้งหมดจะถูก XORed |
|
รูรับแสงรับที่มีประสิทธิภาพ
ตารางที่ 3 คำอธิบายคำสั่งและคำข้อมูลที่มาสเตอร์ส่งไปยังเครื่องกำหนดขอบเขต
ตารางที่ 3 คำอธิบายคำสั่งและคำข้อมูลที่มาสเตอร์ส่งไปยังเครื่องกำหนดขอบเขต
| หมายเลขคำสั่งซื้อ | ซีดับบลิว | การทำงาน | ไบต์ข้อมูล | หมายเหตุ | ความยาว | รหัสตัวอย่าง |
| 1 | 0x00 | หยุด | ข้อมูล=00(ส)ข้อมูล=00(ส) | เรนจ์ไฟนเดอร์หยุดการวัด | หกไบต์ | A5 00 02 00 00 A7 |
| 2 | 0x01 | เดี่ยวตั้งแต่ | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 01 02 00 00 A6 |
| 3 | 0x02 | ต่อเนื่องกัน | DATAH=XX(H)ข้อมูล=ปปป(H) | DATA อธิบายช่วงระยะเวลาในหน่วยมิลลิวินาที | หกไบต์ | A5 02 02 03 E8 4E (ตั้งแต่ 1Hz) |
| 4 | 0x03 | การตรวจสอบตนเอง | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 03 02 00 00 A4 |
| 5 | 0x04 | ตั้งค่าระยะห่างที่ใกล้กับส่วนที่เลือกมากที่สุด | DATAH=XX(H)ข้อมูล=ปปป(H) | DATA อธิบายค่าโซนตาบอด หน่วย 1m | หกไบต์ | A5 04 02 00 64 C7(100ม.คือระยะทางที่ใกล้ที่สุด) |
| 6 | 0x06 | จำนวนแบบสอบถามเอาต์พุตแสงสะสม | ข้อมูล=00(ส)ข้อมูล=00(ส) | จำนวนแบบสอบถามเอาต์พุตแสงสะสม | หกไบต์ | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD เปิดอยู่ | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD ปิดอยู่ | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 12 02 00 00 B5 |
| 9 | 0xEB | สอบถามหมายเลข | ข้อมูล=00(ส)ข้อมูล=00(ส) | สอบถามหมายเลข | หกไบต์ | A5 EB 02 00 00 4C |
ก) รูปแบบการรับการควบคุมหลัก
รูปแบบของข้อความที่จะส่งมีดังนี้:
รูปแบบของข้อความที่จะส่งมีดังนี้:
| STX0 | ซีเอ็มดี | เลน | ข้อมูล | วันที่0 | ซีเอชเค |
ตารางที่ 4 รูปแบบคำอธิบายของข้อความที่ได้รับ
| หมายเลขคำสั่งซื้อ | ชื่อ | อธิบาย | รหัส | หมายเหตุ |
| 1 | STX0 | ข้อความเริ่มต้นแฟล็ก 1 | A5(ส) |
|
| 2 | CMD_JG | คำสั่งข้อมูล | ดูตารางที่ 5 |
|
| 3 | เลน | ดล | จำนวนไบต์ทั้งหมด ยกเว้นเครื่องหมายเริ่มต้น คำคำสั่ง และผลรวมตรวจสอบ |
|
| 4 | ดร | พารามิเตอร์ | ดูตารางที่ 5 |
|
| 5 | D0 |
|
||
| 6 | ซีเอชเค | การตรวจสอบแฮคเกอร์ | ยกเว้นไบต์ที่ถูกต้อง ไบต์อื่นๆ ทั้งหมดจะถูก XORed |
|
คำอธิบายสถานะการรับการควบคุมหลัก:
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดยเรนจ์ไฟนเดอร์ไปยังตัวควบคุมหลัก
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดยเรนจ์ไฟนเดอร์ไปยังตัวควบคุมหลัก
| หมายเลขคำสั่งซื้อ | ซีดับบลิว | การทำงาน | ไบต์ข้อมูล | หมายเหตุ | ความยาวโดยรวม |
| 1 | 0x00 | หยุด | D1=00(ส)D0=00(ส) |
|
หกไบต์ |
| 2 | 0x03 | การตรวจสอบตนเอง | D8~D1 | D8-D7: -5V แรงดันไฟฟ้า หน่วย 0.01V.D6-D5: ค่าจุดบอด หน่วย 1mD4: ค่าไฟฟ้าแรงสูง APD หน่วย V;D3: ชนิดถ่าน แสดงอุณหภูมิ APD หน่วย: องศาเซลเซียส;D2-D1: แรงดันไฟฟ้า +5V หน่วย 0.01V | 12 ไบต์ |
| 3 | 0x04 | ระยะทางไปยังการตั้งค่าการเข้าถึงที่ใกล้ที่สุด หน่วย ม | D1 D0 | DATA อธิบายค่าระยะทางที่ใกล้ที่สุด หน่วย 1m เริ่มต้นสูงและสิ้นสุดต่ำ | หกไบต์ |
| 4 | 0x06 | จำนวนแบบสอบถามเอาต์พุตแสงสะสม | D3~D0 | சராசரி துகள் விட்டம் | เจ็ดไบต์ |
| 5 | 0x11 | APD เปิดอยู่ | D1=00(ส)D0=00(ส) | APD เปิดอยู่ | หกไบต์ |
| 6 | 0x12 | APD ปิดเครื่อง | D1=00(ส)D0=00(ส) | APD ปิดอยู่ | หกไบต์ |
| 7 | 0xED | ทำงานล่วงเวลา | 0x00 0x00 | เลเซอร์อยู่ภายใต้การป้องกันการทำงานของเลเซอร์ และไม่สามารถวัดได้ | หกไบต์ |
| 8 | 0xEE | ข้อผิดพลาดด้านประสิทธิผล | 0x00 0x00 |
|
หกไบต์ |
| 9 | 0XEF | หมดเวลาการสื่อสารพอร์ตอนุกรม | 0x00 0x00 |
|
หกไบต์ |
| 10 | 0x01 | การวัดช่วงเดียว (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 ระยะเป้าหมายแรก (หน่วย 0.1 ม.) ระยะ D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1 ม.) D2-D0 ระยะเป้าหมายที่สาม (หน่วย 0.1 ม.)3. เป้าหมายมาจากใกล้ถึงไกลไบต์แฟล็ก D9 (bit7-bit0): D9 เป็นตำแหน่งที่ 7 ที่ระบุคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 เป็นตำแหน่งที่ 6 บ่งชี้เสียงสะท้อน 1: มี echo, 0: ไม่มี echoD9 ตำแหน่งที่ห้าระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: ข้อผิดพลาดของเลเซอร์ D9 เป็นบิตที่สี่ของธงการหมดเวลา 1: ปกติ 0: การหมดเวลา D9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1) D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ, 0: errorD9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้า 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) D9 บิตที่ 0 ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายที่อยู่หลังเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 11 | 0x02 | การกำหนดระยะต่อเนื่อง (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 ระยะเป้าหมายแรก (หน่วย 0.1 ม.) ระยะ D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1 ม.) D2-D0 ระยะเป้าหมายที่สาม (หน่วย 0.1 ม.)3. เป้าหมายมาจากใกล้ถึงไกลไบต์แฟล็ก D9 (bit7-bit0): D9 เป็นบิตที่ 7 เพื่อระบุคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 เป็นตำแหน่งที่ 6 บ่งชี้เสียงสะท้อน 1: มี echo, 0: ไม่มี echoD9 ตำแหน่งที่ห้าระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: ข้อผิดพลาดของเลเซอร์ D9 เป็นบิตที่สี่ของธงการหมดเวลา 1: ปกติ 0: การหมดเวลา D9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1) D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ, 0: errorD9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้า 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) D9 บิตที่ 0 ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายที่อยู่หลังเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 12 | 0xEB | สอบถามหมายเลข | D17…… D0 | D17 D16 D15 D14 D13 D12 รหัสรุ่นเครื่องทั้งหมดD11D10 หมายเลขผลิตภัณฑ์D9 เวอร์ชันซอฟต์แวร์ D6D5 D4 หมายเลข APDD3 D2 หมายเลขเลเซอร์ เวอร์ชัน D1 ของ FPGA | 22 ไบต์ |
| หมายเหตุ: 1 ไบต์/บิตข้อมูลที่ไม่ได้กำหนด ค่าเริ่มต้นคือ 0; | |||||
แท็กยอดนิยม: โมดูลเลเซอร์เรนจ์ไฟ 2mrad 2 กม. สำหรับป้องกันโดรน ststem ผู้ผลิตซัพพลายเออร์โรงงานจีนผลิตในประเทศจีนกำหนดเองคุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร
โมดูลค้นหาระยะเลเซอร์ 1535nm
โมดูลค้นหาระยะเลเซอร์ 1570nm
โมดูล Rangefinder เลเซอร์ 1.54um
ตัวออกแบบเป้าหมายเลเซอร์ 1064nm
โมดูลต่อต้านเสียงพึมพำ
โมดูล Lidar แบบต่างๆ
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง