บ้าน
>
สินค้า > ไฟเบอร์ออปติกไจโร > ไจโรสโคปไฟเบอร์ออปติก > ไฟเบอร์ออปติก Gyroscope Fog Mems หน่วยวัดเฉื่อย





ไฟเบอร์ออปติก Gyroscope Fog Mems หน่วยวัดเฉื่อย
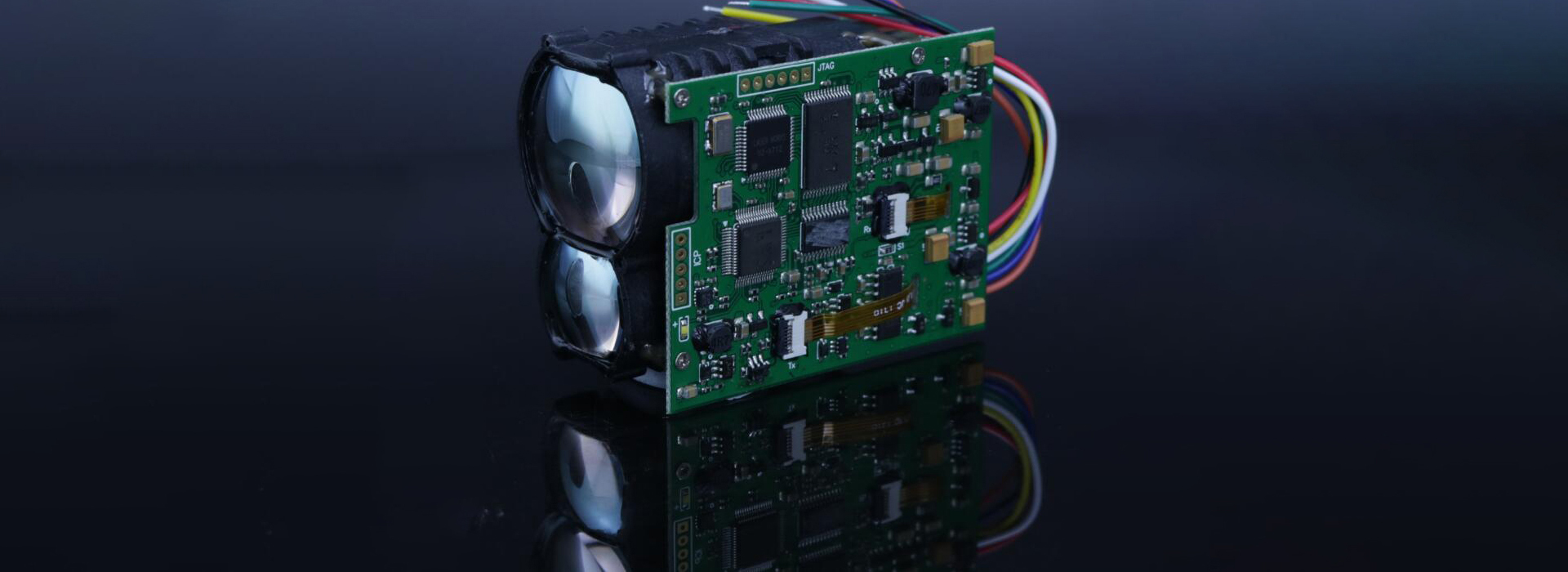
JIO-MC200-IMU เป็นหน่วยวัดความเฉื่อย (IMU) ที่ใช้เทคโนโลยีเครื่องกลขนาดเล็ก (MEMS) พร้อมด้วยไจโร MEMS ประสิทธิภาพสูงในตัวและมาตรวัดความเร่ง MEMS ที่แสดงผลความเร็วเชิงมุม 3 แกนและความเร่ง 3 แกน ยินดีต้อนรับสู่การซื้อหน่วยวัดแรงเฉื่อยของไฟเบอร์ออปติก Gyroscope Fog Mems จากเรา
แบบอย่าง:JIO-MC200-IMU
ส่งคำถาม
รายละเอียดสินค้า
ภาพรวมหน่วยการวัดความเฉื่อยของไฟเบอร์ออปติกไจโรสโคป
JIO-MC200-IMU เป็นหน่วยวัดความเฉื่อย (IMU) ที่ใช้เทคโนโลยีเครื่องกลขนาดเล็ก (MEMS) พร้อมด้วยไจโร MEMS ประสิทธิภาพสูงในตัวและมาตรวัดความเร่ง MEMS ที่แสดงผลความเร็วเชิงมุม 3 แกนและความเร่ง 3 แกน
JIO-MC200-IMU มีความสามารถในการปรับตัวทางเพศและสิ่งแวดล้อมได้ดีเยี่ยม ด้วยการจับคู่ซอฟต์แวร์ที่แตกต่างกัน ผลิตภัณฑ์สามารถใช้กันอย่างแพร่หลายในอาวุธนำวิถี UAV ทางยุทธวิธีและทางอุตสาหกรรม ยานพาหนะทางอากาศไร้คนขับ ซีกเกอร์ รถยนต์ขับเคลื่อนอัตโนมัติ
การติดตั้งไจโรสโคปไฟเบอร์ออปติกของ JIOPTICS เพื่อให้ง่ายต่อการรวมความยืดหยุ่น และชุดเครื่องมือสำหรับนักพัฒนาของเราเพื่อสร้างต้นแบบอย่างรวดเร็ว ไม่เพียงแต่ตอบสนองข้อกำหนดเฉพาะเท่านั้น แต่ยังให้ประสิทธิภาพคุณภาพสูงตรงตามความต้องการของผู้ใช้ปลายทางอีกด้วย
JIO-MC200-IMU มีความสามารถในการปรับตัวทางเพศและสิ่งแวดล้อมได้ดีเยี่ยม ด้วยการจับคู่ซอฟต์แวร์ที่แตกต่างกัน ผลิตภัณฑ์สามารถใช้กันอย่างแพร่หลายในอาวุธนำวิถี UAV ทางยุทธวิธีและทางอุตสาหกรรม ยานพาหนะทางอากาศไร้คนขับ ซีกเกอร์ รถยนต์ขับเคลื่อนอัตโนมัติ
การติดตั้งไจโรสโคปไฟเบอร์ออปติกของ JIOPTICS เพื่อให้ง่ายต่อการรวมความยืดหยุ่น และชุดเครื่องมือสำหรับนักพัฒนาของเราเพื่อสร้างต้นแบบอย่างรวดเร็ว ไม่เพียงแต่ตอบสนองข้อกำหนดเฉพาะเท่านั้น แต่ยังให้ประสิทธิภาพคุณภาพสูงตรงตามความต้องการของผู้ใช้ปลายทางอีกด้วย
บริการของเรา
JIOPTICS เป็นทีมงานมืออาชีพและมีประสิทธิภาพ ให้บริการ OEM/ODM สำหรับคุณ ติดต่อเราเพื่อปรับแต่งไจโรสโคปใยแก้วนำแสงพิเศษของคุณ
คุณสมบัติของสินค้า
1)ไจโรสโคปแบบดิจิตอลสามแกน:
a) ±450º/s ช่วงการวัดไดนามิก;
b) ความเสถียรของอคติเป็นศูนย์: 20°/ชม. (GJB,10S);
2) มาตรความเร่งแบบดิจิตอลสามแกน:
ก) ± 16g ช่วงการวัดแบบไดนามิก;
b) ความเสถียรของอคติเป็นศูนย์: 0.5 มก. (GJB,10S);
3) ความน่าเชื่อถือสูง: MTBF
4)ช่วงอุณหภูมิเต็ม (-40â~70â) เพื่อความถูกต้อง: การสอบเทียบอุณหภูมิประสิทธิภาพสูงในตัวและอัลกอริทึมการชดเชย
5) เหมาะสำหรับงานภายใต้สภาวะการสั่นสะเทือนที่รุนแรง
6) อินเทอร์เฟซ 1 ทาง UART
a) ±450º/s ช่วงการวัดไดนามิก;
b) ความเสถียรของอคติเป็นศูนย์: 20°/ชม. (GJB,10S);
2) มาตรความเร่งแบบดิจิตอลสามแกน:
ก) ± 16g ช่วงการวัดแบบไดนามิก;
b) ความเสถียรของอคติเป็นศูนย์: 0.5 มก. (GJB,10S);
3) ความน่าเชื่อถือสูง: MTBF
4)ช่วงอุณหภูมิเต็ม (-40â~70â) เพื่อความถูกต้อง: การสอบเทียบอุณหภูมิประสิทธิภาพสูงในตัวและอัลกอริทึมการชดเชย
5) เหมาะสำหรับงานภายใต้สภาวะการสั่นสะเทือนที่รุนแรง
6) อินเทอร์เฟซ 1 ทาง UART
ฟิลด์แอ็พพลิเคชัน
1) อาวุธนำวิถี
2) ผู้ค้นหา
3) โดรนทางยุทธวิธีและอุตสาหกรรม
4) ระบบขับเคลื่อนอัตโนมัติ
2) ผู้ค้นหา
3) โดรนทางยุทธวิธีและอุตสาหกรรม
4) ระบบขับเคลื่อนอัตโนมัติ
ลักษณะไฟฟ้า
- แหล่งจ่ายไฟ: อินพุตแรงดันไฟฟ้ากว้าง 12 ~ 36V
- กำลังไฟ: 24W (สูงสุด)
- กำลังไฟ: 24W (สูงสุด)
ตัวชี้วัดผลิตภัณฑ์
| พารามิเตอร์ |
เงื่อนไขการทดสอบ |
ขั้นต่ำ |
ค่าทั่วไป |
มูลค่าสูงสุด |
หน่วย |
|
| ไจโร |
ช่วงการวัดแบบไดนามิก |
|
|
450 |
|
°/วินาที |
| ความเสถียรของอคติเป็นศูนย์ |
เฉลี่ย 10 วินาที (-40â~ 70â, อุณหภูมิคงที่) |
|
20 |
|
°/ชม. |
|
| ไม่มีอคติ |
ช่วงของอคติเป็นศูนย์ |
|
/ - 0.2 |
|
°/วินาที |
|
| ค่าเบี่ยงเบนเป็นศูนย์ â ในช่วงอุณหภูมิทั้งหมด |
|
/ - 0.1 |
|
°/วินาที |
||
| ความสามารถในการทำซ้ำสำหรับการเริ่มต้นอย่างต่อเนื่อง แกน Z |
|
30 |
|
°/ชม. |
||
| ผลของการเร่งเชิงเส้นต่อความเอนเอียงเป็นศูนย์ |
|
10 |
|
°/ชม./ก |
||
| การสั่นสะเทือน â¡ บนเอฟเฟกต์อคติเป็นศูนย์ ก่อนและหลังการเปลี่ยนแปลงการสั่นสะเทือน |
|
10 |
|
°/ชม./ก |
||
| การสั่นสะเทือน â¡ ถึงศูนย์ผลอคติ การสั่นสะเทือนหลังจากการเปลี่ยนแปลงการสั่นสะเทือน |
|
10 |
|
°/ชม./ก |
||
| สเกลแฟกเตอร์ |
ตัวประกอบสเกลไม่เป็นเชิงเส้น |
|
500 |
|
หน้าต่อนาที |
|
| ความแม่นยำของตัวประกอบสเกล |
|
2000 |
|
หน้าต่อนาที |
||
| ความหนาแน่นของเสียง |
|
|
0.003 |
|
° / เฮิร์ตซ์/วินาที) |
|
| ปณิธาน |
|
|
3.052 x 10â7 |
|
°/วินาที/LSB |
|
| มาตรความเร่ง |
ช่วงการวัดแบบไดนามิก |
|
|
16 |
|
g |
| ความเสถียรของอคติเป็นศูนย์ |
เฉลี่ย 10 วินาที (-40â~ 70â, อุณหภูมิคงที่) |
|
0.5 |
|
มก |
|
| ไม่มีอคติ |
ช่วงของอคติเป็นศูนย์ |
|
5 |
|
มก |
|
| ค่าเบี่ยงเบนเป็นศูนย์ในช่วงอุณหภูมิเต็ม |
|
5 |
|
มก |
||
| การทำซ้ำเริ่มต้นอย่างต่อเนื่อง |
|
0.5 |
|
มก |
||
| สเกลแฟกเตอร์ |
ตัวประกอบสเกลไม่เป็นเชิงเส้น |
|
500 |
|
หน้าต่อนาที |
|
| ความแม่นยำของตัวประกอบสเกล |
|
2000 |
|
หน้าต่อนาที |
||
| ความหนาแน่นของเสียง |
|
|
0.05 |
|
เฮิร์ตซ์/มก.) |
|
| ปณิธาน |
|
|
1.221 x 10â8 |
|
g/LSB |
|
| อื่น |
เวลาบูต |
|
|
2 |
|
s |
| พารามิเตอร์ |
เงื่อนไขการทดสอบ |
ขั้นต่ำ |
ทั่วไป |
ค่า |
ค่าสูงสุด |
หน่วย |
| คุณสมบัติ |
แบนด์วิธ |
|
|
200 |
|
เฮิรตซ์ |
| ล่าช้า |
|
|
10 |
|
นางสาว |
|
| อินเทอร์เฟซการสื่อสาร |
UART 1 ทาง |
อัตราการรับส่งข้อมูล |
|
460.8 |
|
กิโลบิตต่อวินาที |
| ความถี่ในการสุ่มตัวอย่าง |
ยูอาร์ที |
|
500 |
|
เฮิรตซ์ |
|
| ลักษณะไฟฟ้า |
แรงดันไฟฟ้า |
|
4.8 |
5 |
5.2 |
V |
| การใช้พลังงาน |
|
|
1.5 |
|
W |
|
| ระลอก |
พีพี |
|
100 |
|
เอ็มวี |
|
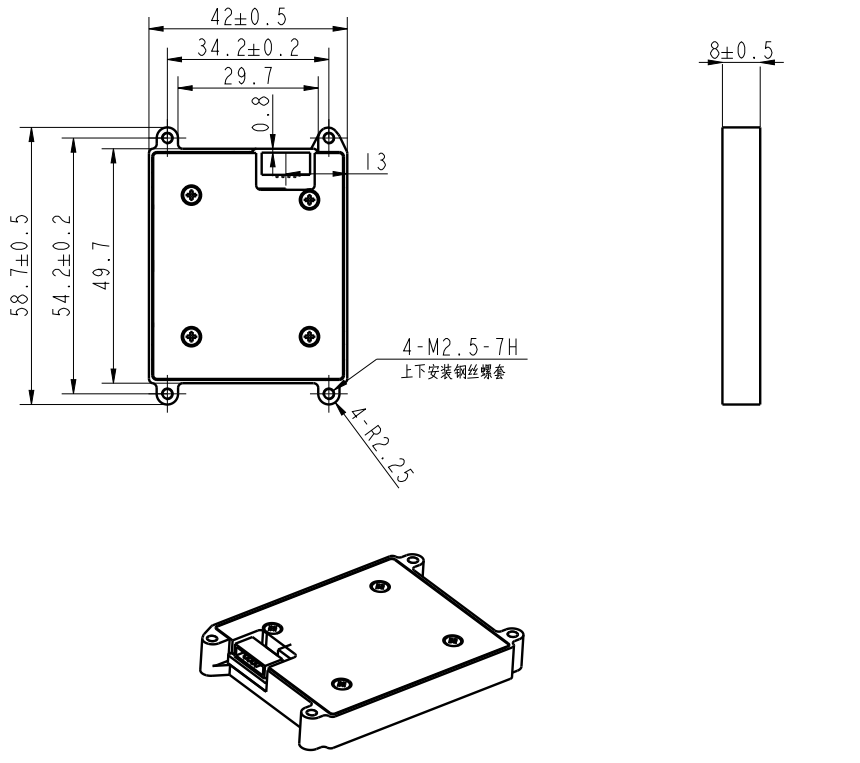
| ลักษณะโครงสร้าง |
ขนาด |
|
|
58.7 x 42 x 8 |
|
มม |
| น้ำหนัก |
|
|
35 |
|
g |
|
| สภาพแวดล้อมการใช้งาน |
อุณหภูมิในการทำงาน |
|
- 40 |
|
70 |
℃ |
| อุณหภูมิในการจัดเก็บ |
|
- 45 |
|
75 |
℃ |
|
| การสั่นสะเทือน |
|
|
20 ถึง 2000Hz, 6.06g |
|
|
|
| ผลกระทบ |
|
|
500g |
|
|
|
| สภาพแวดล้อมการใช้งาน |
เอ็มทีบีเอฟ |
|
|
20000 |
|
h |
| ชั่วโมงการทำงานต่อเนื่อง |
|
|
120 |
|
h |
|
| â : คำนวณส่วนเบี่ยงเบนศูนย์ของกระบวนการเปลี่ยนแปลงอุณหภูมิทั้งหมด อัตราการเปลี่ยนแปลงอุณหภูมิ â¤1â/นาที ช่วงอุณหภูมิ -40â~ 70â â¡ : สภาพการสั่นสะเทือนคือ 6.06g, 20Hz~2000Hz |
||||||
อินเตอร์เฟสไฟฟ้า
ประเภทตัวเชื่อมต่อ: A1251WR-S-4P;
จุดเชื่อมต่อถูกกำหนดไว้ในตารางต่อไปนี้:
จุดเชื่อมต่อถูกกำหนดไว้ในตารางต่อไปนี้:
| หมุด |
คำนิยาม |
ฟังก์ชั่น |
หมายเหตุ |
|
1 |
5V |
กระแสไฟเข้า |
|
|
2 |
จีเอ็นดี |
ถึง |
|
|
3 |
TX LV-TTL |
การส่งพอร์ตอนุกรม |
3.3 โวลต์ |
|
4 |
RX LV-TTL |
การรับพอร์ตอนุกรม |
3.3 โวลต์ |
อินเทอร์เฟซซอฟต์แวร์
อัตรารับส่งข้อมูล: 460800bps;
ส่งความถี่: 500Hz;
รูปแบบข้อมูล: บิตข้อมูล 8, บิตหยุด 1, ไม่มีแพริตีบิต;
เมื่อส่งข้อมูลจะต่ำและสูง
โปรโตคอลการสื่อสารแสดงในตารางต่อไปนี้:
ส่งความถี่: 500Hz;
รูปแบบข้อมูล: บิตข้อมูล 8, บิตหยุด 1, ไม่มีแพริตีบิต;
เมื่อส่งข้อมูลจะต่ำและสูง
โปรโตคอลการสื่อสารแสดงในตารางต่อไปนี้:
| ไบต์ |
ข้อมูล |
รูปร่าง |
ปณิธาน |
หมายเหตุ |
|
1 |
0x5A |
Uint8 |
|
|
|
2 |
0x5A |
Uint8 |
|
|
| 3-6 |
อัตราเชิงมุม X |
ลอย |
|
|
| 7-10 |
อัตราเชิงมุม Y |
ลอย |
|
|
| 11-14 |
อัตราเชิงมุม Z |
ลอย |
|
|
| 15-18 |
อัตราเชิงมุม X |
ลอย |
|
|
| 19-22 |
อัตราเชิงมุม Y |
ลอย |
|
|
| 23-26 |
อัตราเชิงมุม Z |
ลอย |
|
|
| 27-30 |
ที่สงวนไว้ |
Uint8 |
|
|
|
31 |
อุณหภูมิ |
int8 |
1 |
ช่วง: -128 ถึง 127 |
|
32 |
และตรวจสอบ |
Uint8 |
|
1-31 ไบต์เพิ่มขึ้นและลดลง 8 บิต |
ส่วนต่อประสานโครงสร้าง
แท็กยอดนิยม: ไฟเบอร์ออปติก Gyroscope Fog Mems หน่วยวัดเฉื่อย ผู้ผลิต ผู้จำหน่าย โรงงาน จีน ผลิตในประเทศจีน กำหนดเอง คุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง
สินค้าที่เกี่ยวข้อง