โมดูลตัวค้นหาระยะ 9 กม.
โมดูลตัวค้นหาช่วง 9 กม. STA-D0912Y ใช้โมดูลเลเซอร์แก้ว Erbium 1535nm ที่พัฒนาขึ้นอย่างอิสระโดย Jioptics ซึ่งมีลักษณะของการใช้พลังงานต่ำโครงสร้างขนาดกะทัดรัดความแม่นยำสูงระยะไกลและความปลอดภัยของดวงตาของมนุษย์
ส่งคำถาม
รายละเอียดสินค้า
ช่วงการวัดสูงสุด: 9000m (ยานพาหนะ) 12000 m (ผนัง)
ความแม่นยำ± 1m
ความแม่นยำในการวัด≥ 98%
น้ำหนัก≤102g
ความแม่นยำ± 1m
ความแม่นยำในการวัด≥ 98%
น้ำหนัก≤102g
คุณสมบัติโมดูลตัวค้นหาระยะ 9 กม.
1. การออกแบบแบบบูรณาการของโครงสร้างทั้งหมด, ความต้านทานการกระแทก, ความต้านทานการสั่นสะเทือน, ความน่าเชื่อถือสูง, ความสามารถในการปรับตัวด้านสิ่งแวดล้อมที่แข็งแกร่ง;
2. การใช้การออกแบบการกำหนดค่าแบบบูรณาการเลเซอร์เออร์เบียมที่ไม่เหมือนใคร
3. อินเทอร์เฟซภายในของวงจรทั้งหมดใช้กระบวนการเชื่อมต่อสายเชื่อมเชื่อมโดยตรงซึ่งมีความมั่นคงและเชื่อถือได้ซึ่งสามารถหลีกเลี่ยงการลัดวงจรหรือการสัมผัสที่ไม่ดีที่เกิดจากการคลายออกซิเดชันและไอน้ำของตัวเชื่อมต่อและปรับปรุงความน่าเชื่อถือและอายุการใช้งานของผลิตภัณฑ์
2. การใช้การออกแบบการกำหนดค่าแบบบูรณาการเลเซอร์เออร์เบียมที่ไม่เหมือนใคร
3. อินเทอร์เฟซภายในของวงจรทั้งหมดใช้กระบวนการเชื่อมต่อสายเชื่อมเชื่อมโดยตรงซึ่งมีความมั่นคงและเชื่อถือได้ซึ่งสามารถหลีกเลี่ยงการลัดวงจรหรือการสัมผัสที่ไม่ดีที่เกิดจากการคลายออกซิเดชันและไอน้ำของตัวเชื่อมต่อและปรับปรุงความน่าเชื่อถือและอายุการใช้งานของผลิตภัณฑ์
ดัชนีประสิทธิภาพผลิตภัณฑ์
| รายการ | ดัชนี | |
| แบบอย่าง | STA-D0912Y | |
| ความยาวคลื่นในการทำงาน | 1535nm ± 10nm | |
| ช่วง | 80m-12000m | |
| ความสามารถในการจัดระเบียบ | 16000m | เป้าหมายทั่วไปการมองเห็น≥ 25km |
| 12000m | เป้าหมายขนาดใหญ่ทัศนวิสัย≥ 25km | |
| 9000m | ทัศนวิสัย≥ 25km เป้าหมายที่มีการสะท้อนแสง 0.3 สำหรับยานพาหนะ 2.3m × 4.6m | |
| ความชื้น | ≤ 80% | |
| ความแม่นยำ | ± 1m | |
| อัตราความถูกต้อง | ≥98% | |
| ความละเอียดช่วง | ≤50m | |
| มุมแตกต่าง | ≤0.5MRAD | |
| ความถี่ตั้งแต่ | ครั้งหนึ่ง 1Hz, 5Hz | |
| ขนาด | ≤66มม. × 59 มม. × 42 มม. | |
| แรงดันไฟฟ้า | 5V ~ 14V | |
| การใช้พลังงานทำงาน | การใช้พลังงานเฉลี่ย: ≤ 3W | |
| การใช้พลังงานสแตนด์บาย | ≤0.01W | |
| อุณหภูมิในการทำงาน | -40 ℃~+60 ℃ | |
| อุณหภูมิการจัดเก็บ | -55 ℃~+70 ℃ | |
| น้ำหนัก | ≤102g | |
อินเทอร์เฟซการติดตั้งโครงสร้าง


อินเทอร์เฟซไฟฟ้า
ปลายคอมพิวเตอร์ด้านบนตระหนักถึงการทดสอบการเชื่อมโยงข้ามด้วย Rangefinder ผ่านตัวเชื่อมต่อ 10pin คำจำกัดความของพินของพอร์ตแหล่งจ่ายไฟและการสื่อสารที่ปลายเรนจ์ไฟเตอร์จะแสดงในตารางต่อไปนี้และตำแหน่งของพินเชื่อมต่อเชื่อมต่อ 1 จะแสดงในรูปต่อไปนี้
นิยามพินของแหล่งจ่ายไฟและพอร์ตการสื่อสารที่ปลายช่วง
| หมายเลขพิน | ตัวเลข | ความหมายของลักษณะไฟฟ้า | หมายเหตุ |
| P-1 | vin+ | พลังงานอินพุตเป็นบวก | แหล่งจ่ายไฟ |
| P-2 | com | ขั้วลบของพลังงานอินพุต | |
| P-3 | power_ctl | พอร์ตควบคุมพลังงานต่ำ | มีประสิทธิภาพระงับหรือสูง (3V ~ 9V) |
| P-4 | rs422_txd+ | พอร์ตเอาต์พุตสัญญาณ | Rangefinder เพื่อโฮสต์คอมพิวเตอร์ |
| P-5 | rs422_txd- | ||
| P-6 | rs422_txd- | พอร์ตอินพุตสัญญาณ | คอมพิวเตอร์ส่วนบนถึง RangeFinder |
| P-7 | rs422_txd+ | ||
| P-8 | gnd | สายการสื่อสาร | สายการสื่อสาร |
| P-9 | ttl_rxd | พอร์ตอินพุตสัญญาณ | 3.3V TTL |
| P-10 | ttl_txd | พอร์ตเอาต์พุตสัญญาณ |
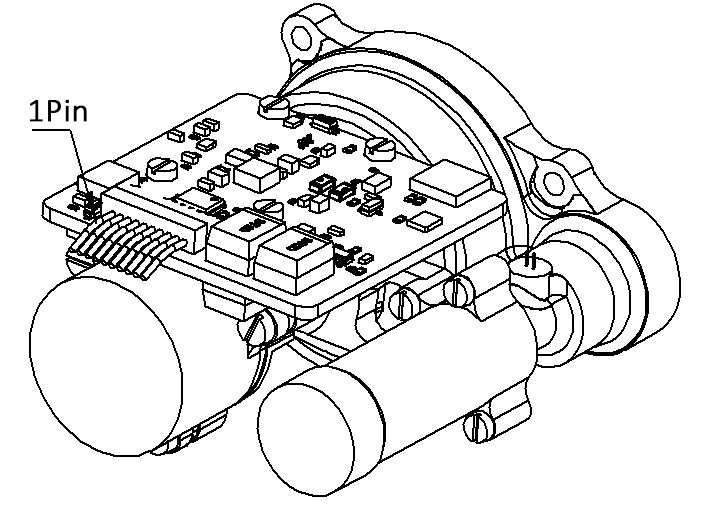
การเชื่อมต่อตัวเชื่อมต่อ 1 ตำแหน่งตำแหน่ง
ซอฟต์แวร์
ข้อมูล
ข้อมูล
การส่งข้อมูลระหว่าง RangeFinder และคอมพิวเตอร์ส่วนบนรวมถึงเนื้อหาต่อไปนี้:
●คำสั่งควบคุม: รวมคำสั่งเดี่ยว 1Hz, คำสั่ง 5Hz คำสั่งหลากหลาย, คำสั่งแบบสอบถาม, ฯลฯ ;
●ข้อมูลส่งคืน: รวมถึงข้อมูลระยะทาง, อุณหภูมิโดยรอบ, สถานะเรนจ์ไฟเตอร์ ฯลฯ
การแลกเปลี่ยนข้อมูลระหว่าง RangeFinder และคอมพิวเตอร์ส่วนบนใช้ RS422/TTL (สองเลือก 1) และลักษณะของมันมีดังนี้:
●อัตราการรับส่งข้อมูล: 38400 (โรงงาน)/9600/57600/115200;
●โครงสร้างไบต์: ลำดับต่ำด้านหน้าลำดับสูงในด้านหลัง;
●องค์ประกอบไบต์: บิตเริ่มต้น 1 บิต, บิตข้อมูล 8 บิต, ไม่มีการตรวจสอบ, บิตหยุด 1 บิต
●คำสั่งควบคุม: รวมคำสั่งเดี่ยว 1Hz, คำสั่ง 5Hz คำสั่งหลากหลาย, คำสั่งแบบสอบถาม, ฯลฯ ;
●ข้อมูลส่งคืน: รวมถึงข้อมูลระยะทาง, อุณหภูมิโดยรอบ, สถานะเรนจ์ไฟเตอร์ ฯลฯ
การแลกเปลี่ยนข้อมูลระหว่าง RangeFinder และคอมพิวเตอร์ส่วนบนใช้ RS422/TTL (สองเลือก 1) และลักษณะของมันมีดังนี้:
●อัตราการรับส่งข้อมูล: 38400 (โรงงาน)/9600/57600/115200;
●โครงสร้างไบต์: ลำดับต่ำด้านหน้าลำดับสูงในด้านหลัง;
●องค์ประกอบไบต์: บิตเริ่มต้น 1 บิต, บิตข้อมูล 8 บิต, ไม่มีการตรวจสอบ, บิตหยุด 1 บิต
ข้อมูล
รูปแบบของข้อมูลคำสั่งควบคุมจะแสดงในตารางต่อไปนี้
ข้อมูลคำสั่งควบคุมที่ได้รับจาก RangeFinder
| ไบต์ | อธิบาย | ข้อมูลไบต์ (คำสั่ง, ข้อมูล, ตรวจสอบบิต) | หมายเหตุ |
| 1 | ส่วนหัวเฟรม | 0x55 |
|
| 2-5 |
|
1 ตั้งแต่: 0xf2 0x00 0x00 0xf2 | ข้อมูลข้อเสนอแนะแสดงในตารางด้านล่าง |
| 1Hz ตั้งแต่: 0xf3 0x01 0x00 0xf2 | |||
| 5Hz ตั้งแต่: 0xf3 0x02 0x00 0xf1 | |||
| หยุดตั้งแต่: 0xf3 0x00 0x00 0xf3 | |||
| การตั้งค่าอัตราการรับส่งข้อมูล: 0xf6 _ _0xxx | ____ ตั้งค่าอัตราการรับส่งข้อมูล/100 (การเป็นตัวแทนเลขฐานสิบหก) โดยที่ 0xxx เป็น XOR ของ 2-4 ไบต์ | ||
| คำสั่งตรวจสอบด้วยตนเอง: 0xf0 0x00 0x00 0xf0 | ข้อมูลข้อเสนอแนะแสดงในตารางด้านล่าง | ||
| คำแนะนำแบบสอบถาม: 0xf8 0x00 0x00 0xf8 | |||
| Gating value setting: 0xF4 ___ ___ 0xXX | ___ เป็นค่า Strobe ที่ตั้งไว้ (การเป็นตัวแทนเลขฐานสิบหก) และ 0xxx เป็นพิเศษหรือ 2 ถึง 4 ไบต์ | ||
| 6 | สิ้นสุดเฟรม | 0! |
|
ข้อมูลการส่งคืนของ RangeFinder แบ่งออกเป็นข้อมูลปกติและข้อมูลการทดสอบตนเอง
●ข้อมูลปกติ: รวมถึงจำนวนเป้าหมายระยะการวัดสถานะ RangeFinder ฯลฯ ดูตารางด้านล่าง
●ข้อมูลการสืบค้น: รวมถึงอุณหภูมิโดยรอบสถานะ RangeFinder ฯลฯ ดูตารางด้านล่าง
●ข้อมูลปกติ: รวมถึงจำนวนเป้าหมายระยะการวัดสถานะ RangeFinder ฯลฯ ดูตารางด้านล่าง
●ข้อมูลการสืบค้น: รวมถึงอุณหภูมิโดยรอบสถานะ RangeFinder ฯลฯ ดูตารางด้านล่าง
ข้อมูลทั่วไปที่ส่งคืนโดยเครื่องวัดระยะทาง
| ไบต์ | อธิบาย | ค่าไบต์ (เลขฐานสิบหก) |
| 1 | ส่วนหัว | 0! |
| 2 | จำนวนเป้าหมาย |
|
| 3 | ไบต์สูงของข้อมูลระยะทางเป้าหมายแรก |
|
| 4 | ไบต์ต่ำของข้อมูลระยะทางเป้าหมายแรก |
|
| 5 | ข้อมูลระยะไกลเป้าหมายแรกหลักทศนิยม | สองตำแหน่งทศนิยมหลังจากจุดทศนิยม |
| 6 | ไบต์สูงของข้อมูลระยะทางเป้าหมายสุดท้าย |
|
| 7 | ไบต์ต่ำของข้อมูลระยะทางเป้าหมายสุดท้าย |
|
| 8 | ข้อมูลระยะไกลเป้าหมายสุดท้ายตัวเลขทศนิยม | สองตำแหน่งทศนิยมหลังจากจุดทศนิยม |
| 9 | ไบต์สถานะตั้งแต่ | คำสถานะดูตารางด้านล่าง |
| 10 ~ 13 | จำนวนเอาต์พุตแสง |
|
| 14 | ตรวจสอบคำ | ไบต์ 2-13 XOR |
| 15 | สิ้นสุดเฟรม | 0x55 |
ความหมายของคำสถานะ
| หมายเลขซีเรียล | ไบต์ 9 | ความสำคัญ |
| 1 | 0xf2 | 1 ตั้งแต่ |
| 2 | 0xf3 | 1Hz ตั้งแต่ |
| 3 | 0xf4 | 5Hz ตั้งแต่ |
| 4 | 0xf5 | หยุด |
ข้อมูลสอบถามที่ส่งกลับโดย RangeFinder
| ไบต์ | อธิบาย | ค่าไบต์ (เลขฐานสิบหก) |
| 1 | ส่วนหัวเฟรม | 0xcc |
| 2 | สแตนด์บาย | สแตนด์บาย |
| 3 | ไบต์อุณหภูมิโดยรอบ | หมายเลขที่ลงนาม 8 บิตหน่วย: ℃ |
| 4 | ไบต์ข้อมูลการทดสอบตนเอง | 0x 00 ระบุค่าเริ่มต้นแบบสอบถาม 0x 03 ระบุว่าแสงตรวจสอบตัวเองเป็นเรื่องปกติ 0xff หมายถึงแสงที่ตรวจพบตัวเองผิดปกติ |
| 5 | ไบต์สถานะการทำงานที่มีความเข้มสูง | 1: บิตตั้งค่าสถานะโหมดการทำงานปกติ 0: บิตตั้งค่าสถานะโหมดการทำงานที่มีความเข้มสูง |
| 6 | ค่าแฟลชระยะทางสูงไบต์สูง | การเป็นตัวแทนหกสิบ |
| 7 | ไบต์ต่ำของค่า gating ระยะทาง | |
| 8 | อัตราการรับส่งข้อมูลไบต์สูง | การเป็นตัวแทนของ Hexadecimal, อัตราการรับส่งข้อมูลเป็นข้อมูลแบบวนซ้ำ * 100 |
| 9 | อัตราการรับส่งสัญญาณไบต์ต่ำ | |
| 10 | จำนวนแสงสูง 8 บิต | การเป็นตัวแทนหกสิบ |
| 11 | ||
| 12 | จำนวนแสงออกต่ำ 8 บิต | |
| 13 | ||
| 14 | ตรวจสอบคำ | ไบต์ 2-13 XOR |
| 15 | สิ้นสุดเฟรม | 0x55 |
การตั้งค่าอัตราการรับส่งข้อมูล
วิธีการตั้งค่าอัตราการรับส่งข้อมูล:
A.Send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx" คำสั่งไปยังตัวค้นหาช่วงเลเซอร์ i .e ตั้งค่าอัตราการรับส่งข้อมูลเป็น 9600bps; RangeFinder ส่งคืน "CC 01 19 00 01 00 00 00 60 00 00 00 79 55", "0x 00 0x 60" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 9600bps;
B.Send "0x 55 0xf6 0x 01 0x 80 0x 77 0xxx" คำสั่งเลเซอร์ Rangefinder, i .e ตั้งค่าอัตราการรับส่งข้อมูลเป็น 38400bps; RangeFinder ส่งคืน "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55" และ "0x 01 0x 80" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 38400bps;
C.Send "0x 55 0xf6 0x 02 0x 40 0xb4 0xxx" คำสั่งเลเซอร์ Rangefinder นั่นคือตั้งค่าอัตราการรับส่งข้อมูลเป็น 57600bps; RangeFinder ส่งกลับ "CC 01 19 00 01 00 00 02 40 00 00 00 00 5B 55" และ "0x 02 0x 40" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 57600bps;
d.send "0x 55 0xf6 0x 04 0x 80 0x 72 0xxx" คำสั่งเลเซอร์ Rangefinder, i .e กำหนดอัตราการรับส่งข้อมูลเป็น 115200bps; RangeFinder ส่งคืน "CC 01 19 00 01 00 04 80 00 00 00 9d 55", "0x 04 0x 80" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 115200bps
A.Send "0x 55 0xf6 0x 00 0x 60 0x 96 0xxx" คำสั่งไปยังตัวค้นหาช่วงเลเซอร์ i .e ตั้งค่าอัตราการรับส่งข้อมูลเป็น 9600bps; RangeFinder ส่งคืน "CC 01 19 00 01 00 00 00 60 00 00 00 79 55", "0x 00 0x 60" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 9600bps;
B.Send "0x 55 0xf6 0x 01 0x 80 0x 77 0xxx" คำสั่งเลเซอร์ Rangefinder, i .e ตั้งค่าอัตราการรับส่งข้อมูลเป็น 38400bps; RangeFinder ส่งคืน "CC 01 19 00 01 00 00 01 80 00 00 00 00 98 55" และ "0x 01 0x 80" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 38400bps;
C.Send "0x 55 0xf6 0x 02 0x 40 0xb4 0xxx" คำสั่งเลเซอร์ Rangefinder นั่นคือตั้งค่าอัตราการรับส่งข้อมูลเป็น 57600bps; RangeFinder ส่งกลับ "CC 01 19 00 01 00 00 02 40 00 00 00 00 5B 55" และ "0x 02 0x 40" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 57600bps;
d.send "0x 55 0xf6 0x 04 0x 80 0x 72 0xxx" คำสั่งเลเซอร์ Rangefinder, i .e กำหนดอัตราการรับส่งข้อมูลเป็น 115200bps; RangeFinder ส่งคืน "CC 01 19 00 01 00 04 80 00 00 00 9d 55", "0x 04 0x 80" ระบุว่าอัตราการรับส่งข้อมูลปัจจุบันถูกตั้งค่าเป็น 115200bps
แท็กยอดนิยม: โมดูลตัวค้นหาระยะ 9 กม. ผู้ผลิตซัพพลายเออร์โรงงานประเทศจีนผลิตในประเทศจีนคุณภาพสูงที่ปรับแต่งและมีคุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร
โมดูลค้นหาระยะเลเซอร์ 1535nm
โมดูลค้นหาระยะเลเซอร์ 1570nm
โมดูล Rangefinder เลเซอร์ 1.54um
ตัวออกแบบเป้าหมายเลเซอร์ 1064nm
โมดูลต่อต้านเสียงพึมพำ
โมดูล Lidar แบบต่างๆ
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง