บ้าน
>
สินค้า > โมดูลค้นหาระยะด้วยเลเซอร์ > โมดูลค้นหาระยะเลเซอร์ 1535nm > โมดูล Rangefinder เลเซอร์ที่ปลอดภัย 7km (LRF)




")
โมดูล Rangefinder เลเซอร์ที่ปลอดภัย 7km (LRF)
STA-B0710X เป็นโมดูลการวัดระยะทางเลเซอร์ที่ปลอดภัยต่อดวงตาของมนุษย์ซึ่งสามารถตรวจจับระยะทางเป้าหมายและส่งระยะทางที่วัดได้ไปยังคอมพิวเตอร์ด้านบนผ่านการสื่อสารแบบอนุกรม ทัศนวิสัย≥ 15 กม., การสะท้อนแสงเป้าหมาย≥ 0.3, ความชื้น≤ 80%, ยานพาหนะ (2.3m × 2.3m เป้าหมายนาโต้) ตั้งแต่ระยะทาง≥7km; อาคารเป้าหมายสูงสุด≥10km
ส่งคำถาม
รายละเอียดสินค้า
ฟังก์ชั่นหลัก
(1) การจัดเรียงเดี่ยวและต่อเนื่อง
(2) การตอบสนองต่อคำสั่งเลเซอร์และสามารถหยุดได้ตลอดเวลาตามคำสั่งหยุด
(3) ข้อมูลระยะทางเอาท์พุทและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ในระหว่างการวัดระยะทาง
(4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสม (ไม่มีการสูญเสียพลังงานลง);
(5) การเลือกระยะทางข้อบ่งชี้เป้าหมายด้านหน้าและด้านหลัง
(6) ฟังก์ชั่นการทดสอบตัวเอง
(2) การตอบสนองต่อคำสั่งเลเซอร์และสามารถหยุดได้ตลอดเวลาตามคำสั่งหยุด
(3) ข้อมูลระยะทางเอาท์พุทและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ในระหว่างการวัดระยะทาง
(4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสม (ไม่มีการสูญเสียพลังงานลง);
(5) การเลือกระยะทางข้อบ่งชี้เป้าหมายด้านหน้าและด้านหลัง
(6) ฟังก์ชั่นการทดสอบตัวเอง
การแนะนำผลิตภัณฑ์
B0710X Laser Rangefinder Module เป็นเครื่องฟอกข้อมูลเลเซอร์ชีพจรทหารที่ออกแบบมาสำหรับสถานการณ์การใช้งานเช่นเครื่องบินยานพาหนะทางอากาศที่ไม่มีคนขับรถถังและขอบเขต มันมีขนาดเล็กน้ำหนักเบาการใช้พลังงานต่ำประสิทธิภาพที่มั่นคงระยะการวัดระยะยาวและอายุการใช้งานที่ยาวนานความปลอดภัยของดวงตามนุษย์และข้อได้เปรียบอื่น ๆ เป็นอุปกรณ์ทางเทคนิคที่สำคัญในการปรับปรุงความแม่นยำของผลิตภัณฑ์
ดัชนีประสิทธิภาพผลิตภัณฑ์สำหรับโมดูล LRF ที่ปลอดภัยต่อตา B0710X
| รายการ | พารามิเตอร์ทางเทคนิค | คำแนะนำ |
| แบบอย่าง | STA-B0710X | |
| ความยาวคลื่นทำงาน | 1535 ± 5nm | |
| ความปลอดภัยของตา | คลาส 1 (IEC 60825-1) | |
| รับรูรับแสง | φ33mm | |
| รูรับแสงที่ปล่อยออกมา | φ14mm | |
| ความสามารถในการจัดระเบียบ | 50m-10km | |
| ช่วง | ≥14000m | ช่วงสูงสุด, การสะท้อนแสง: 0.9, ทัศนวิสัยของผู้สังเกตการณ์ 25 กม. |
| ≥10000m | การสร้างเป้าหมายการสะท้อนแสง: 0.6, ทัศนวิสัยของผู้สังเกตการณ์ 25 กม. | |
| ≥7000m | เป้าหมายของนาโต้ | |
| ≥4500m | เป้าหมายของมนุษย์ | |
| ≥1500m | เป้าหมาย UAV | |
| ช่วงขนาดเล็ก | 50 เมตร |
|
| การตรวจจับหลายเป้าหมาย | เป้าหมายสูงสุด 3 เป้าหมาย |
|
| ความแม่นยำ | ± 1m | 3D |
| ความถี่ตั้งแต่ | 1 ~ 10Hz ปรับได้ |
|
| อัตราความถูกต้อง | ≥98% |
|
| อัตราการเตือนที่ผิดพลาด | 1% |
|
| มุมแตกต่าง | ≤0.3MRAD |
|
| อินเทอร์เฟซการสื่อสาร | RS422 | สามารถปรับแต่งอินเทอร์เฟซ TTL/RS232 ได้ |
| แรงดันไฟฟ้า | 9 ~ 32V | แรงดันไฟฟ้าอินพุตสามารถปรับแต่งตามข้อกำหนด |
| พลังในการทำงาน | ≤3w (@10Hz) | การทดสอบอุณหภูมิปกติ |
| พลังสูงสุด | ≤5W | การทดสอบอุณหภูมิปกติ |
| ช็อตเชิงกล | 75g, 1ms |
|
| อุณหภูมิในการทำงาน | -40 ℃~+60 ℃ |
|
| อุณหภูมิการจัดเก็บ | -45 ℃~+70 ℃ |
|
| ความน่าเชื่อถือ | MTBF ≥ 1500H |
|
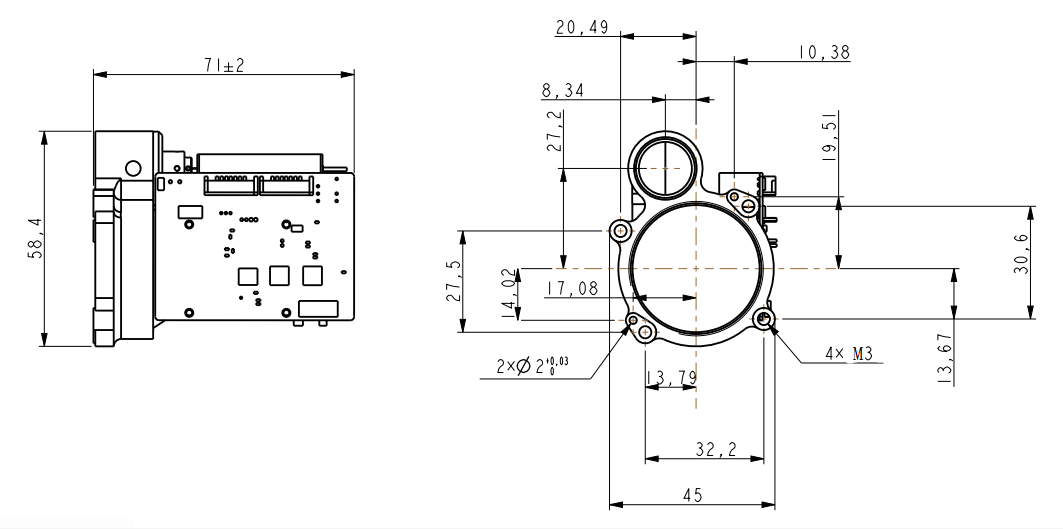
| ขนาด | ≤73× 45 × 59 มม. |
|
| น้ำหนัก | ≤133G |
|
| ฟังก์ชั่นหลัก | เป้าหมายแรกและสุดท้ายตั้งแต่การเลือกระยะเวลาหลายเป้าหมายการเลือกระยะทาง | |
หมายเหตุ:
1) ขนาดเป้าหมายของนาโต้ 2.3 m × 2.3 ม.; ขนาดเป้าหมายของมนุษย์ 0.5 m × 1.7 ม.; UAV ขนาดเป้าหมาย 0.2 m × 0.3m; การสะท้อนแสง 30%, การมองเห็นผู้สังเกตการณ์≥ 15km
อินเทอร์เฟซการติดตั้งโครงสร้าง
อินเทอร์เฟซภายนอก
| เข็มหมุด | คำนิยาม | การทำงาน | หมายเหตุ |
| 1 | RX+ | ตัวรับสัญญาณ RS422 + | สีฟ้า |
| 2 | rx- | ตัวรับสัญญาณ RS422 - | สีเขียว |
| 3 | tx- | การส่ง RS422 - | สีม่วง |
| 4 | TX+ | การส่ง RS422 + | สีเหลือง |
| 5 | gnd | สายการสื่อสาร | สีขาว |
| 6 | ม้วน | แหล่งจ่ายไฟ + | สีแดง |
| 7 | gnd | แหล่งจ่ายไฟ - | สีดำ |
| 8 | PWN และ | / | เถ้า |
การปรับตัวด้านสิ่งแวดล้อม
a) อุณหภูมิการทำงาน: -40 ℃~+60 ℃。
b) อุณหภูมิการจัดเก็บ: -45 ℃~+70 ℃。
C) การสั่นสะเทือนแบบสุ่ม: 15 ~ 2000Hz, 3 ทิศทาง เงื่อนไขการทดสอบเฉพาะแสดงในตารางที่ 1
b) อุณหภูมิการจัดเก็บ: -45 ℃~+70 ℃。
C) การสั่นสะเทือนแบบสุ่ม: 15 ~ 2000Hz, 3 ทิศทาง เงื่อนไขการทดสอบเฉพาะแสดงในตารางที่ 1
ตารางที่ 1 เงื่อนไขการทดสอบการสั่นสะเทือนแบบสุ่ม
| หมายเลขซีเรียล | ช่วงความถี่ (Hz) | ความหนาแน่นสเปกตรัมการเร่งความเร็ว (G2/Hz) | เวลาการสั่นสะเทือน (นาที) |
| 1 | 15 ~ 190 | 0.01 | การสั่นสะเทือนในทุกทิศทาง 15 นาที |
| 2 | 190 ~ 210 | 0.1 | |
| 3 | 210 ~ 380 | 0.01 | |
| 4 | 380 ~ 420 | 0.025 | |
| 5 | 420 ~ 2000 | 0.01 |
OEM/ODM หลากหลายโมดูลและโซลูชั่นที่กำหนดเอง
B0710X ได้รับการออกแบบมาสำหรับผู้รวมระบบที่กำลังมองหาโซลูชันเลเซอร์ที่สะดวกสบายทรงพลังและกะทัดรัด ให้ประสิทธิภาพที่เชื่อถือได้ในแอพพลิเคชั่นที่หลากหลาย
มันมีขนาดเล็กมากแสงพิเศษมีการใช้พลังงานต่ำและสามารถวัดได้ในระยะไกล มันเหมาะสำหรับอุปกรณ์พกพา (การถ่ายภาพความร้อน) แอปพลิเคชันการติดตั้งอาวุธระบบพกพาและห้องสวีทเซ็นเซอร์น้ำหนักเบาและยานพาหนะทางอากาศที่ไม่มีคนขับหรือ UGVs
มันมีขนาดเล็กมากแสงพิเศษมีการใช้พลังงานต่ำและสามารถวัดได้ในระยะไกล มันเหมาะสำหรับอุปกรณ์พกพา (การถ่ายภาพความร้อน) แอปพลิเคชันการติดตั้งอาวุธระบบพกพาและห้องสวีทเซ็นเซอร์น้ำหนักเบาและยานพาหนะทางอากาศที่ไม่มีคนขับหรือ UGVs
การสื่อสารโปรโตคอล
1. โปรโตคอลการส่ง: การสื่อสารอนุกรมแบบอะซิงโครนัส;
2. อัตราพอร์ต: 115200;
3. บิตข้อมูล: 10bits: หนึ่งบิตเริ่มต้น, 8 บิตข้อมูล, หนึ่งบิตหยุดหนึ่งบิต, การตรวจสอบไม่ถูกต้อง;
4. โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์ส่วนหัว, ส่วนคำสั่ง, ความยาวข้อมูล, ส่วนพารามิเตอร์และตรวจสอบไบต์;
5. โหมดการสื่อสาร: การควบคุมหลักส่งคำสั่งควบคุมไปยังเครื่องที่หลากหลายและเครื่องที่ได้รับและดำเนินการตามคำแนะนำ ในสถานะที่หลากหลายเครื่องจักรที่มีการส่งข้อมูลและสถานะของเครื่องที่หลากหลายกลับไปที่คอมพิวเตอร์ส่วนบนตามวัฏจักรหลากหลาย รูปแบบการสื่อสารและเนื้อหาคำสั่งจะแสดงในตารางต่อไปนี้
a) การควบคุมหลักส่ง
รูปแบบของข้อความที่จะส่งมีดังนี้:
2. อัตราพอร์ต: 115200;
3. บิตข้อมูล: 10bits: หนึ่งบิตเริ่มต้น, 8 บิตข้อมูล, หนึ่งบิตหยุดหนึ่งบิต, การตรวจสอบไม่ถูกต้อง;
4. โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์ส่วนหัว, ส่วนคำสั่ง, ความยาวข้อมูล, ส่วนพารามิเตอร์และตรวจสอบไบต์;
5. โหมดการสื่อสาร: การควบคุมหลักส่งคำสั่งควบคุมไปยังเครื่องที่หลากหลายและเครื่องที่ได้รับและดำเนินการตามคำแนะนำ ในสถานะที่หลากหลายเครื่องจักรที่มีการส่งข้อมูลและสถานะของเครื่องที่หลากหลายกลับไปที่คอมพิวเตอร์ส่วนบนตามวัฏจักรหลากหลาย รูปแบบการสื่อสารและเนื้อหาคำสั่งจะแสดงในตารางต่อไปนี้
a) การควบคุมหลักส่ง
รูปแบบของข้อความที่จะส่งมีดังนี้:
| STX0 | CMD | เลิร์น | data1h | data1l | CHK |
ตารางที่ 2 คำอธิบายรูปแบบของข้อความที่ส่ง
| หมายเลขสั่งซื้อ | ชื่อ | อธิบาย | รหัส | ข้อสังเกต |
| 1 | STX0 | ข้อความเริ่มต้นการตั้งค่าสถานะ | A5 (H) |
|
| 2 | CMD | CW | ดูตารางที่ 3 |
|
| 3 | เลิร์น | DL | จำนวนไบต์ทั้งหมดยกเว้นเครื่องหมายเริ่มต้นคำสั่งและการตรวจสอบ |
|
| 4 | เป็นดารา | พารามิเตอร์ | ดูตารางที่ 3 |
|
| 5 | การมาถึง |
|
||
| 6 | CHK | การตรวจสอบ XOR | ยกเว้นไบต์ที่ถูกต้องไบต์อื่น ๆ ทั้งหมดจะเป็น xored |
|
คำสั่งอธิบายดังนี้:
ตารางที่ 3 คำอธิบายของคำสั่งและคำข้อมูลที่ส่งโดยอาจารย์ไปยังเครื่องที่หลากหลาย
ตารางที่ 3 คำอธิบายของคำสั่งและคำข้อมูลที่ส่งโดยอาจารย์ไปยังเครื่องที่หลากหลาย
| หมายเลขสั่งซื้อ | CW | การทำงาน | ไบต์ข้อมูล | ข้อสังเกต | ความยาว | รหัสตัวอย่าง |
| 1 | 0x00 | หยุด | datah = 00 (h) datal = 00 (h) | Rangefinder หยุดการวัด | หกไบต์ | A5 00 02 00 A7 |
| 2 | 0x01 | เดี่ยว | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 01 02 00 00 A6 |
| 3 | 0x02 | อย่างต่อเนื่อง | datah = xx (h) datal = yy (h) | ข้อมูลอธิบายช่วงเวลาที่หลากหลายใน MS | หกไบต์ | A5 02 02 03 E8 4E (1Hz ตั้งแต่) |
| 4 | 0x03 | การตรวจสอบตนเอง | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 02 02 00 A4 |
| 5 | 0x04 | ตั้งระยะทางที่ใกล้เคียงที่สุดกับการเลือก | datah = xx (h) datal = yy (h) | ข้อมูลอธิบายค่าโซนตาบอดหน่วย 1m | หกไบต์ | A5 04 02 00 64 C7 (100m เป็นระยะทางที่ใกล้ที่สุด) |
| 6 | 0x06 | จำนวนคิวรีไฟที่เพิ่มขึ้น | datah = 00 (h) datal = 00 (h) | จำนวนคิวรีไฟที่เพิ่มขึ้น | หกไบต์ | A5 06 02 00 A1 |
| 7 | 0x11 | พลังงาน APD เปิดอยู่ | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 11 02 00 B6 |
| 8 | 0x12 | พลังงาน APD ปิดอยู่ | datah = 00 (h) datal = 00 (h) |
|
หกไบต์ | A5 12 02 00 B5 |
| 9 | 0xeb | แบบสอบถามหมายเลข | datah = 00 (h) datal = 00 (h) | แบบสอบถามหมายเลข | หกไบต์ | A5 EB 02 00 00 4C |
a) การควบคุมหลักได้รับรูปแบบ
รูปแบบของข้อความที่ได้รับมีดังนี้:
รูปแบบของข้อความที่ได้รับมีดังนี้:
| STX0 | CMD | เลิร์น | ข้อมูล | วันที่ 0 | CHK |
| หมายเลขสั่งซื้อ | ชื่อ | อธิบาย | รหัส | ข้อสังเกต |
| 1 | STX0 | ข้อความเริ่มต้นธง 1 | A5 (H) |
|
| 2 | cmd_jg | คำสั่งข้อมูล | ดูตารางที่ 5 |
|
| 3 | เลิร์น | DL | จำนวนไบต์ทั้งหมดยกเว้นเครื่องหมายเริ่มต้นคำสั่งและการตรวจสอบ |
|
| 4 | DN | พารามิเตอร์ | ดูตารางที่ 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | การตรวจสอบ XOR | ยกเว้นไบต์ที่ถูกต้องไบต์อื่น ๆ ทั้งหมดจะเป็น xored |
|
คำอธิบายสถานะการควบคุมหลักการควบคุม:
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดย RangeFinder ไปยังตัวควบคุมหลัก
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดย RangeFinder ไปยังตัวควบคุมหลัก
| หมายเลขสั่งซื้อ | CW | การทำงาน | ไบต์ข้อมูล | ข้อสังเกต | ความยาวโดยรวม |
| 1 | 0x00 | หยุด | d1 = 00 (h) d0 = 00 (h) |
|
หกไบต์ |
| 2 | 0x03 | การตรวจสอบตนเอง | d8 ~ d1 | D8-D7: -5V แรงดันไฟฟ้า, หน่วย 0.01V.D6-D5: ค่าสปอตตาบอด, หน่วย 1MD4: ค่าแรงดันไฟฟ้าสูง APD, หน่วย V; D3: ชนิดถ่าน, อุณหภูมิ APD, หน่วย: องศาเซลเซียส; D2-D1: +5V แรงดันไฟฟ้า, หน่วย 0.01V | 12 ไบต์ |
| 3 | 0x04 | ระยะทางไปยังการตั้งค่าการเข้าถึงที่ใกล้ที่สุดหน่วย M | D1 D0 | ข้อมูลอธิบายค่าระยะทางที่ใกล้ที่สุดหน่วย 1m เริ่มสูงและสิ้นสุดต่ำ | หกไบต์ |
| 4 | 0x06 | จำนวนคิวรีไฟที่เพิ่มขึ้น | d3 ~ d0 | ข้อมูลเป็นการแสดงออกถึงจำนวนไฟ 4 ไบต์ด้วยไบต์สูงก่อน | เจ็ดไบต์ |
| 5 | 0x11 | พลังงาน APD เปิดอยู่ | d1 = 00 (h) d0 = 00 (h) | พลังงาน APD เปิดอยู่ | หกไบต์ |
| 6 | 0x12 | APD Power ปิด | d1 = 00 (h) d0 = 00 (h) | พลังงาน APD ปิดอยู่ | หกไบต์ |
| 7 | 0xed | ทำงานล่วงเวลา | 0x00 0x00 | เลเซอร์อยู่ภายใต้การป้องกันการทำงานด้วยเลเซอร์และไม่สามารถวัดได้ | หกไบต์ |
| 8 | 0xee | ข้อผิดพลาดประสิทธิผล | 0x00 0x00 |
|
หกไบต์ |
| 9 | 0xef | หมดเวลาการสื่อสารพอร์ตอนุกรม | 0x00 0x00 |
|
หกไบต์ |
| 10 | 0x01 | การวัดช่วงเดียว (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | ระยะทางเป้าหมายแรก D8-D6 (หน่วย 0.1m) ระยะทาง D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1m) D2-D0 ระยะทางเป้าหมายที่สาม (หน่วย 0.1m) 3 เป้าหมายมาจากใกล้กับ FARD9 (BIT7-BIT0) BYTE: D9 เป็นตำแหน่งที่ 7 ที่บ่งบอกถึงคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 คือตำแหน่งที่ 6 ที่บ่งบอกถึงเสียงสะท้อน; 1: มี echo, 0: ไม่มี echod9 ตำแหน่งที่ห้าระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: เลเซอร์ faultD9 เป็นบิตที่สี่ของธงหมดเวลา, 1: ปกติ, 0: TimeOutD9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1); D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ 0: Errord9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้านี้ 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) .D9 บิต 0th ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายหลังจากเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 11 | 0x02 | การจัดเรียงอย่างต่อเนื่อง (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9 D8 D7 D6D5 D4D2 D1 D0 | ระยะทางเป้าหมายแรก D8-D6 (หน่วย 0.1m) ระยะทาง D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1m) D2-D0 ระยะทางเป้าหมายที่สาม (หน่วย 0.1m) 3 เป้าหมายมาจากใกล้กับ FARD9 (BIT7-BIT0) BYTE: D9 เป็นบิตที่ 7 เพื่อระบุคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 คือตำแหน่งที่ 6 ที่บ่งบอกถึงเสียงสะท้อน; 1: มี echo, 0: ไม่มี echod9 ตำแหน่งที่ห้าระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: เลเซอร์ faultD9 เป็นบิตที่สี่ของธงหมดเวลา, 1: ปกติ, 0: TimeOutD9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1); D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ 0: Errord9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้านี้ 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) .D9 บิต 0th ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายหลังจากเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 12 | 0xeb | แบบสอบถามหมายเลข | D17 …… D0 | D17 D16 D15 D14 D13 D12 Whole Machine Model Coded11d10 Product NumberD9 D6 Software VersionD5 D4 APD NumberD3 D2 Laser NumberVersion D1 ของ FPGA | 22 ไบต์ |
| หมายเหตุ: ①ข้อมูลที่ไม่ได้กำหนดไบต์/บิตค่าเริ่มต้นคือ 0; | |||||
แท็กยอดนิยม: โมดูล Rangefinder เลเซอร์ที่ปลอดภัย 7km (LRF), ผู้ผลิต, ซัพพลายเออร์, โรงงาน, จีน, ผลิตในประเทศจีน, ปรับแต่งคุณภาพสูง, คุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร
โมดูลค้นหาระยะเลเซอร์ 1535nm
โมดูลค้นหาระยะเลเซอร์ 1570nm
โมดูล Rangefinder เลเซอร์ 1.54um
ตัวออกแบบเป้าหมายเลเซอร์ 1064nm
โมดูลต่อต้านเสียงพึมพำ
โมดูล Lidar แบบต่างๆ
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง