บ้าน
>
สินค้า > โมดูลค้นหาระยะด้วยเลเซอร์ > โมดูลค้นหาระยะเลเซอร์ 1535nm > โมดูลเรนจ์ไฟเลเซอร์ที่ปลอดภัยต่อดวงตา 5 กม. (LRF)




")




โมดูลเรนจ์ไฟเลเซอร์ที่ปลอดภัยต่อดวงตา 5 กม. (LRF)
STA-B50MX เป็นโมดูลการวัดระยะด้วยเลเซอร์ที่ปลอดภัยต่อสายตาของมนุษย์ ซึ่งสามารถตรวจจับระยะห่างเป้าหมายและส่งระยะทางที่วัดได้ไปยังคอมพิวเตอร์ส่วนบนผ่านการสื่อสารแบบอนุกรม ทัศนวิสัย ≥ 12 กม. การสะท้อนเป้าหมาย ≥ 0.3 ความชื้น ≤ 80% ยานพาหนะ (เป้าหมาย NATO 2.3 ม. × 2.3 ม.) ตั้งแต่ระยะทาง ≥5 กม.
ส่งคำถาม
รายละเอียดสินค้า
ฟังก์ชั่นหลัก
(1) ช่วงเดี่ยวและช่วงต่อเนื่อง
(2) ตอบสนองต่อคำสั่งกำหนดระยะเลเซอร์ และสามารถหยุดกำหนดระยะได้ตลอดเวลาตามคำสั่งหยุด
(3) ข้อมูลระยะทางเอาท์พุตและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ในระหว่างการวัดระยะทาง
(4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสมได้ (ไม่มีการสูญเสียพลังงานลง)
(5) การเลือกระยะ การบ่งชี้เป้าหมายด้านหน้าและด้านหลัง
(6) ฟังก์ชั่นการทดสอบตัวเอง
(2) ตอบสนองต่อคำสั่งกำหนดระยะเลเซอร์ และสามารถหยุดกำหนดระยะได้ตลอดเวลาตามคำสั่งหยุด
(3) ข้อมูลระยะทางเอาท์พุตและข้อมูลสถานะหนึ่งครั้งต่อพัลส์ในระหว่างการวัดระยะทาง
(4) สามารถรายงานจำนวนพัลส์เลเซอร์ที่ส่งสะสมได้ (ไม่มีการสูญเสียพลังงานลง)
(5) การเลือกระยะ การบ่งชี้เป้าหมายด้านหน้าและด้านหลัง
(6) ฟังก์ชั่นการทดสอบตัวเอง
ดัชนีประสิทธิภาพผลิตภัณฑ์
| รายการ | พารามิเตอร์ทางเทคนิค | คำแนะนำ |
| แบบอย่าง | STA-B50MX | |
| ความยาวคลื่นในการทำงาน | 1535 ± 5 นาโนเมตร | |
| ความปลอดภัยของดวงตา | รุ่นที่ 1 (IEC 60825-1) | |
| การรับรูรับแสง | Φ25มม | |
| รูรับแสง | Φ10มม | |
| ความสามารถที่หลากหลาย | 30-8000ม | |
| ช่วงตั้งแต่ | ≥10,000ม | ช่วง MAX การสะท้อนแสง: 0.9 ทัศนวิสัยของผู้สังเกตการณ์ 25 กม |
| ≥7000ม | เป้าหมายอาคารขนาดใหญ่ การสะท้อนแสง: 0.6 ทัศนวิสัยผู้สังเกต 20 กม | |
| ≥5,000ม | เป้าหมายของนาโต้ | |
| ≥3000ม | เป้าหมายของมนุษย์ | |
| ≥1500ม | เป้าหมายของยูเอวี | |
| มินิเรนจ์ | 30ม |
|
| การตรวจจับหลายเป้าหมาย | มากถึง 3 เป้าหมาย |
|
| ความละเอียดช่วง | 30ม |
|
| ความแม่นยำตั้งแต่ | ±1ม |
|
| ความถี่ตั้งแต่ | ปรับได้ 1 ~ 10Hz |
|
| อัตราความแม่นยำ | ≥98% |
|
| อัตราการเตือนที่ผิดพลาด | 1% |
|
| มุมที่แตกต่าง | ≤0.5mrad |
|
| อินเตอร์เฟซการสื่อสาร | RS422 | สามารถปรับแต่งอินเทอร์เฟซ TTL/RS232 ได้ |
| แรงดันไฟฟ้า | ดีซี9~32V |
|
| การใช้พลังงาน | ≤1.2W(@1hz) | พลังการทำงาน |
| ≤5W@12V | พลังสูงสุด | |
| 0.1W | พลังงานสแตนด์บาย (เชื่อมต่อ POWER-ON) | |
| ความเสถียรของแกนแสงเลเซอร์ | ≤0.05mrad |
|
| ข้อผิดพลาดแบบขนาน | ≤0.3mrad | ข้อผิดพลาดความขนานของแกนแสงกับการอ้างอิงการติดตั้ง |
| แรงกระแทกทางกล | 75 ก., 1 มิลลิวินาที |
|
| อุณหภูมิในการทำงาน | -40°C~+70°C |
|
| อุณหภูมิในการจัดเก็บ | -55°C~+75°C |
|
| ความน่าเชื่อถือ | MTBF ≥ 1500 ชม |
|
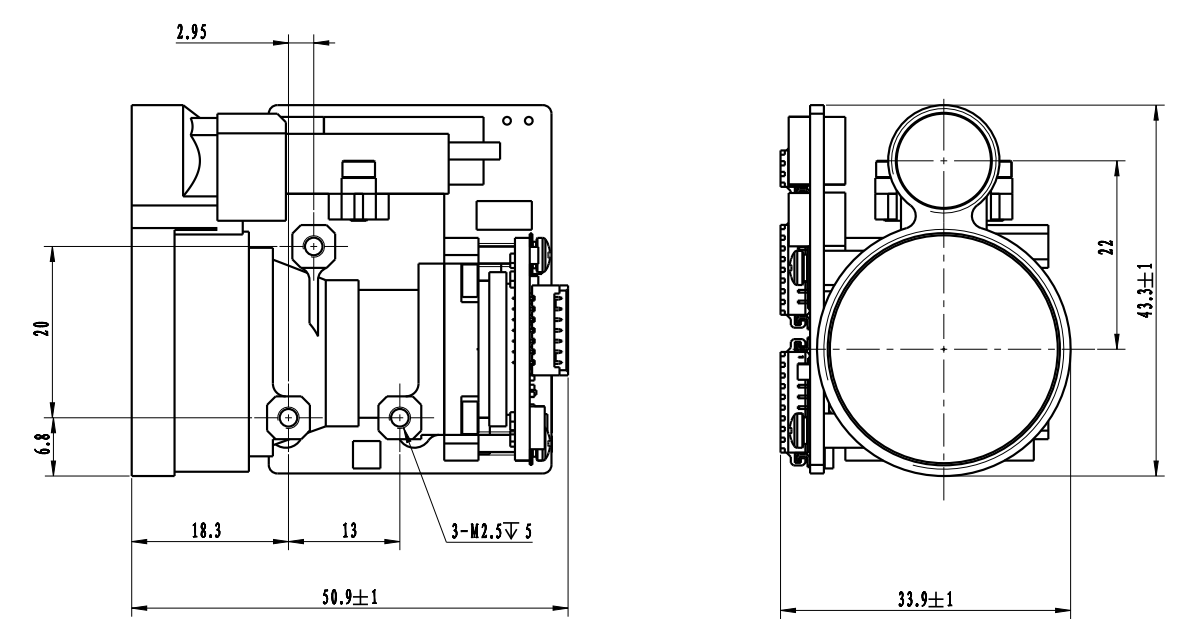
| ขนาด | ≤50x32x43.5มม |
|
| น้ำหนัก | ≤75ก |
|
| ฟังก์ชั่นหลัก | ระยะเป้าหมายแรกและสุดท้าย, ระยะหลายเป้าหมาย, การเลือกระยะทาง | |
หมายเหตุ:
1) เป้าหมาย NATO ขนาด 2.3 ม. × 2.3 ม. เป้าหมายมนุษย์ขนาด 0.5 ม. × 1.7 ม. UAV เป้าหมายขนาด 0.2 ม. × 0.3 ม. การสะท้อนแสง 30%, ความชื้น≤80%, การมองเห็นของผู้สังเกตการณ์≥ 12 กม
อินเทอร์เฟซการติดตั้งโครงสร้าง
อินเทอร์เฟซภายนอก
| เข็มหมุด | คำนิยาม | การทำงาน | หมายเหตุ |
| 1 | อาร์เอ็กซ์+ | ตัวรับ RS422 + | สีฟ้า |
| 2 | รับ- | ตัวรับ RS422 - | สีเขียว |
| 3 | เท็กซัส- | ระบบส่งกำลัง RS422 - | สีม่วง |
| 4 | เท็กซัส+ | ระบบส่งกำลัง RS422 + | สีเหลือง |
| 5 | จีเอ็นดี | สายดินสื่อสาร | สีขาว |
| 6 | วี | แหล่งจ่ายไฟ + | สีแดง |
| 7 | จีเอ็นดี | แหล่งจ่ายไฟ - | สีดำ |
| 8 | PWR TH | / | เถ้า |
อินเทอร์เฟซภายนอก
โมดูลตั้งแต่ OEM/ODM และโซลูชันแบบกำหนดเอง
B50MX ได้รับการออกแบบมาสำหรับผู้วางระบบที่กำลังมองหาโซลูชันกำหนดระยะเลเซอร์ที่สะดวก ทรงพลัง และกะทัดรัด โดยให้ประสิทธิภาพที่เชื่อถือได้ในการใช้งานที่หลากหลาย
มีขนาดเล็กมาก เบาเป็นพิเศษ ใช้พลังงานต่ำ และสามารถวัดได้ในระยะไกล เหมาะสำหรับอุปกรณ์มือถือ (การถ่ายภาพความร้อน) การใช้งานติดตั้งอาวุธ ระบบพกพา และชุดเซ็นเซอร์น้ำหนักเบา และยานพาหนะทางอากาศไร้คนขับหรือ UGV
B50MX ได้รับการออกแบบมาสำหรับผู้วางระบบที่กำลังมองหาโซลูชันกำหนดระยะเลเซอร์ที่สะดวก ทรงพลัง และกะทัดรัด โดยให้ประสิทธิภาพที่เชื่อถือได้ในการใช้งานที่หลากหลาย
มีขนาดเล็กมาก เบาเป็นพิเศษ ใช้พลังงานต่ำ และสามารถวัดได้ในระยะไกล เหมาะสำหรับอุปกรณ์มือถือ (การถ่ายภาพความร้อน) การใช้งานติดตั้งอาวุธ ระบบพกพา และชุดเซ็นเซอร์น้ำหนักเบา และยานพาหนะทางอากาศไร้คนขับหรือ UGV
โปรโตคอลการสื่อสาร
1. โปรโตคอลการรับส่งข้อมูล: การสื่อสารแบบอนุกรมแบบอะซิงโครนัส;
2. อัตราพอร์ต: 115200;
3. บิตข้อมูล: 10 บิต: หนึ่งบิตเริ่มต้น, 8 บิตข้อมูล, หนึ่งบิตหยุด, การตรวจสอบที่ไม่ถูกต้อง;
4. โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์ส่วนหัว ส่วนคำสั่ง ความยาวข้อมูล ส่วนพารามิเตอร์ และไบต์ตรวจสอบ
5. โหมดการสื่อสาร: ตัวควบคุมหลักจะส่งคำสั่งควบคุมไปยังเครื่องกำหนดพิกัด และเครื่องกำหนดพิกัดจะรับและดำเนินการตามคำแนะนำ ในสถานะช่วง เครื่องกำหนดช่วงจะส่งข้อมูลและสถานะของเครื่องกำหนดช่วงกลับไปยังคอมพิวเตอร์ส่วนบนตามรอบของช่วง รูปแบบการสื่อสารและเนื้อหาคำสั่งแสดงอยู่ในตารางต่อไปนี้
A) การส่งการควบคุมหลัก
รูปแบบของข้อความที่จะส่งมีดังนี้:
2. อัตราพอร์ต: 115200;
3. บิตข้อมูล: 10 บิต: หนึ่งบิตเริ่มต้น, 8 บิตข้อมูล, หนึ่งบิตหยุด, การตรวจสอบที่ไม่ถูกต้อง;
4. โครงสร้างข้อมูล: ข้อมูลประกอบด้วยไบต์ส่วนหัว ส่วนคำสั่ง ความยาวข้อมูล ส่วนพารามิเตอร์ และไบต์ตรวจสอบ
5. โหมดการสื่อสาร: ตัวควบคุมหลักจะส่งคำสั่งควบคุมไปยังเครื่องกำหนดพิกัด และเครื่องกำหนดพิกัดจะรับและดำเนินการตามคำแนะนำ ในสถานะช่วง เครื่องกำหนดช่วงจะส่งข้อมูลและสถานะของเครื่องกำหนดช่วงกลับไปยังคอมพิวเตอร์ส่วนบนตามรอบของช่วง รูปแบบการสื่อสารและเนื้อหาคำสั่งแสดงอยู่ในตารางต่อไปนี้
A) การส่งการควบคุมหลัก
รูปแบบของข้อความที่จะส่งมีดังนี้:
| STX0 | ซีเอ็มดี | เลน | ข้อมูล1H | DATA1L | ซีเอชเค |
ตารางที่ 2 รูปแบบคำอธิบายของข้อความที่ส่ง
| หมายเลขคำสั่งซื้อ | ชื่อ | อธิบาย | รหัส | หมายเหตุ |
| 1 | STX0 | แฟล็กเริ่มต้นข้อความ | A5(ส) |
|
| 2 | ซีเอ็มดี | ซีดับบลิว | ดูตารางที่ 3 |
|
| 3 | เลน | ดล | จำนวนไบต์ทั้งหมด ยกเว้นเครื่องหมายเริ่มต้น คำคำสั่ง และผลรวมตรวจสอบ |
|
| 4 | ดาต้าห์ | พารามิเตอร์ | ดูตารางที่ 3 |
|
| 5 | ดาต้าล |
|
||
| 6 | ซีเอชเค | การตรวจสอบแฮคเกอร์ | ยกเว้นไบต์ที่ถูกต้อง ไบต์อื่นๆ ทั้งหมดจะถูก XORed |
|
คำสั่งอธิบายไว้ดังนี้:
ตารางที่ 3 คำอธิบายของคำสั่งและคำข้อมูลที่ส่งโดยต้นแบบไปยังเครื่องกำหนดขอบเขต
ตารางที่ 3 คำอธิบายของคำสั่งและคำข้อมูลที่ส่งโดยต้นแบบไปยังเครื่องกำหนดขอบเขต
| หมายเลขคำสั่งซื้อ | ซีดับบลิว | การทำงาน | ไบต์ข้อมูล | หมายเหตุ | ความยาว | รหัสตัวอย่าง |
| 1 | 0x00 | หยุด | ข้อมูล=00(ส)ข้อมูล=00(ส) | เรนจ์ไฟนเดอร์หยุดการวัด | หกไบต์ | A5 00 02 00 00 A7 |
| 2 | 0x01 | เดี่ยวตั้งแต่ | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 01 02 00 00 A6 |
| 3 | 0x02 | ต่อเนื่องกัน | DATAH=XX(H)ข้อมูล=ปปป(H) | DATA อธิบายช่วงระยะเวลาในหน่วยมิลลิวินาที | หกไบต์ | A5 02 02 03 E8 4E (ตั้งแต่ 1Hz) |
| 4 | 0x03 | การตรวจสอบตนเอง | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 03 02 00 00 A4 |
| 5 | 0x04 | ตั้งค่าระยะห่างที่ใกล้กับส่วนที่เลือกมากที่สุด | DATAH=XX(H)ข้อมูล=ปปป(H) | DATA อธิบายค่าโซนตาบอด หน่วย 1m | หกไบต์ | A5 04 02 00 64 C7(100m เป็นระยะทางที่ใกล้ที่สุด) |
| 6 | 0x06 | จำนวนแบบสอบถามเอาต์พุตแสงสะสม | ข้อมูล=00(ส)ข้อมูล=00(ส) | จำนวนแบบสอบถามเอาต์พุตแสงสะสม | หกไบต์ | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD เปิดอยู่ | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD ปิดอยู่ | ข้อมูล=00(ส)ข้อมูล=00(ส) |
|
หกไบต์ | A5 12 02 00 00 B5 |
| 9 | 0xEB | สอบถามหมายเลข | ข้อมูล=00(ส)ข้อมูล=00(ส) | สอบถามหมายเลข | หกไบต์ | A5 EB 02 00 00 4C |
ก) รูปแบบการรับการควบคุมหลัก
รูปแบบของข้อความที่ได้รับจะเป็นดังนี้:
รูปแบบของข้อความที่ได้รับจะเป็นดังนี้:
| STX0 | ซีเอ็มดี | เลน | ข้อมูล | ข้อมูล0 | ซีเอชเค |
ตารางที่ 4 รูปแบบคำอธิบายของข้อความที่ได้รับ
| หมายเลขคำสั่งซื้อ | ชื่อ | อธิบาย | รหัส | หมายเหตุ |
| 1 | STX0 | ข้อความเริ่มต้นแฟล็ก 1 | A5 (ซ) |
|
| 2 | CMD_JG | คำสั่งข้อมูล | ดูตารางที่ 5 |
|
| 3 | เลน | ดล | จำนวนไบต์ทั้งหมด ยกเว้นเครื่องหมายเริ่มต้น คำคำสั่ง และผลรวมตรวจสอบ |
|
| 4 | ดร | พารามิเตอร์ | ดูตารางที่ 5 |
|
| 5 | D0 |
|
||
| 6 | ซีเอชเค | การตรวจสอบแฮคเกอร์ | ยกเว้นไบต์ที่ถูกต้อง ไบต์อื่นๆ ทั้งหมดจะถูก XORed |
|
คำอธิบายสถานะการรับการควบคุมหลัก:
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดยเรนจ์ไฟนเดอร์ไปยังตัวควบคุมหลัก
ตารางที่ 5 อธิบายคำข้อมูลที่ส่งโดยเรนจ์ไฟนเดอร์ไปยังตัวควบคุมหลัก
| หมายเลขคำสั่งซื้อ | ซีดับบลิว | การทำงาน | ไบต์ข้อมูล | หมายเหตุ | ความยาวโดยรวม |
| 1 | 0x00 | หยุด | D1=00(ส) D0=00 (ส) |
|
หกไบต์ |
| 2 | 0x03 | การตรวจสอบตนเอง | D8 ~D1 | D8-D7: -5V แรงดันไฟฟ้า หน่วย 0.01V.D6-D5: ค่าจุดบอด หน่วย 1mD4: ค่าไฟฟ้าแรงสูง APD หน่วย V;D3: ชนิดถ่าน แสดงอุณหภูมิ APD หน่วย: องศาเซลเซียส;D2-D1: แรงดันไฟฟ้า +5V หน่วย 0.01V | 12 ไบต์ |
| 3 | 0x04 | ระยะทางไปยังการตั้งค่าการเข้าถึงที่ใกล้ที่สุด หน่วย ม | D1 D0 | DATA อธิบายค่าระยะทางที่ใกล้ที่สุด หน่วย 1m เริ่มต้นสูงและสิ้นสุดต่ำ | หกไบต์ |
| 4 | 0x06 | จำนวนแบบสอบถามเอาต์พุตแสงสะสม | D3~D0 | DATA แสดงจำนวนไฟ 4 ไบต์ โดยให้ไบต์สูงอยู่ก่อน | เจ็ดไบต์ |
| 5 | 0x11 | APD เปิดอยู่ | D1=00(ส) D0=00 (ส) | APD เปิดอยู่ | หกไบต์ |
| 6 | 0x12 | APD ปิดเครื่อง | D1=00(ส) D0=00 (ส) | APD ปิดอยู่ | หกไบต์ |
| 7 | 0xED | ทำงานล่วงเวลา | 0x00 0x00 | เลเซอร์อยู่ภายใต้การป้องกันการทำงานของเลเซอร์ และไม่สามารถวัดได้ | หกไบต์ |
| 8 | 0xEE | ข้อผิดพลาดด้านประสิทธิผล | 0x00 0x00 |
|
หกไบต์ |
| 9 | 0XEF | หมดเวลาการสื่อสารพอร์ตอนุกรม | 0x00 0x00 |
|
หกไบต์ |
| 10 | 0x01 | การวัดช่วงเดียว (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 ระยะเป้าหมายแรก (หน่วย 0.1 ม.) ระยะ D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1 ม.) D2-D0 ระยะเป้าหมายที่สาม (หน่วย 0.1 ม.)3. เป้าหมายมาจากใกล้ถึงไกลไบต์แฟล็ก D9 (bit7-bit0): D9 เป็นตำแหน่งที่ 7 ที่ระบุคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 เป็นตำแหน่งที่ 6 บ่งชี้เสียงสะท้อน 1: มี echo, 0: ไม่มี echoD9 ตำแหน่งที่ห้าระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: ข้อผิดพลาดของเลเซอร์ D9 เป็นบิตที่สี่ของธงการหมดเวลา 1: ปกติ 0: การหมดเวลา D9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1) D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ, 0: errorD9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้า 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) D9 บิตที่ 0 ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายที่อยู่หลังเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 11 | 0x02 | การกำหนดระยะต่อเนื่อง (เป้าหมายเดียว, ศูนย์สำหรับเป้าหมายที่สองและสาม, ศูนย์สำหรับเป้าหมายที่สามที่จุดเริ่มต้นและจุดสิ้นสุดของเป้าหมาย) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 ระยะเป้าหมายแรก (หน่วย 0.1 ม.) ระยะ D5-D3 ไปยังเป้าหมายที่สอง (หน่วย: 0.1 ม.) D2-D0 ระยะเป้าหมายที่สาม (หน่วย 0.1 ม.)3. เป้าหมายมาจากใกล้ถึงไกลไบต์แฟล็ก D9 (bit7-bit0): D9 เป็นบิตที่ 7 เพื่อระบุคลื่นหลัก 1: มีคลื่นหลัก 0: ไม่มีคลื่นหลัก D9 เป็นตำแหน่งที่ 6 บ่งชี้เสียงสะท้อน 1: มี echo, 0: ไม่มี echoD9 ตำแหน่งที่ห้าระบุสถานะเลเซอร์; 1: เลเซอร์ปกติ, 0: ข้อผิดพลาดของเลเซอร์ D9 เป็นบิตที่สี่ของธงการหมดเวลา 1: ปกติ 0: การหมดเวลา D9 ไม่ถูกต้องที่ตำแหน่งที่ 3 (ตั้งค่าเป็น 1) D9 ตำแหน่งที่สองระบุสถานะ APD; 1: ปกติ, 0: errorD9 เป็นตำแหน่งแรกที่ระบุว่ามีเป้าหมายก่อนหน้าหรือไม่ 1: มีเป้าหมายก่อนหน้า 0: ไม่มีเป้าหมายก่อนหน้า (เป้าหมายในพื้นที่ตาบอด) D9 บิตที่ 0 ระบุว่ามีเป้าหมายที่ตามมาหรือไม่ 1: มีเป้าหมายที่ตามมา 0: ไม่มีเป้าหมายที่ตามมา (เป้าหมายที่อยู่หลังเป้าหมายหลักคือเป้าหมายที่ตามมา) | 14 ไบต์ |
| 12 | 0xEB | สอบถามหมายเลข | D17…… D0 | D17 D16 D15 D14 D13 D12 รหัสรุ่นเครื่องทั้งหมดD11D10 หมายเลขผลิตภัณฑ์D9 เวอร์ชันซอฟต์แวร์ D6D5 D4 หมายเลข APDD3 D2 หมายเลขเลเซอร์ เวอร์ชัน D1 ของ FPGA | 22 ไบต์ |
| หมายเหตุ: 1 ไบต์/บิตข้อมูลที่ไม่ได้กำหนด ค่าเริ่มต้นคือ 0; | |||||
แท็กยอดนิยม: โมดูลเรนจ์ไฟเลเซอร์ที่ปลอดภัยต่อดวงตา 5 กม. (LRF) ผู้ผลิตซัพพลายเออร์โรงงานจีนผลิตในประเทศจีนกำหนดเองคุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร
โมดูลค้นหาระยะเลเซอร์ 1535nm
โมดูลค้นหาระยะเลเซอร์ 1570nm
โมดูล Rangefinder เลเซอร์ 1.54um
ตัวออกแบบเป้าหมายเลเซอร์ 1064nm
โมดูลต่อต้านเสียงพึมพำ
โมดูล Lidar แบบต่างๆ
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง