บ้าน
>
สินค้า > โมดูลค้นหาระยะด้วยเลเซอร์ > โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร > โมดูลวัดระยะด้วยเลเซอร์ขนาดเล็ก 2 กม





โมดูลวัดระยะด้วยเลเซอร์ขนาดเล็ก 2 กม
โมดูลวัดระยะด้วยเลเซอร์ขนาดเล็ก STA-D20X ใช้เลเซอร์เซมิคอนดักเตอร์ 905 นาโนเมตร ซึ่งมีคุณลักษณะในระยะไกล ใช้พลังงานต่ำ ขนาดเล็ก และความปลอดภัยของดวงตา เหมาะอย่างยิ่งสำหรับการบูรณาการกระเปาะยานพาหนะทางอากาศไร้คนขับขนาดเล็ก อุปกรณ์มองเห็นตอนกลางคืนแบบมือถือ การถ่ายภาพความร้อน และอุปกรณ์อื่นๆ
ส่งคำถาม
รายละเอียดสินค้า
ระยะสูงสุด: 2000 ม
ความแม่นยำตั้งแต่: ± 1m
ความถี่ตั้งแต่: ช่วงช็อตเดียว, 1Hz, 2Hz
น้ำหนัก:10ก. ±0.5ก
คุณสมบัติที่สำคัญ:
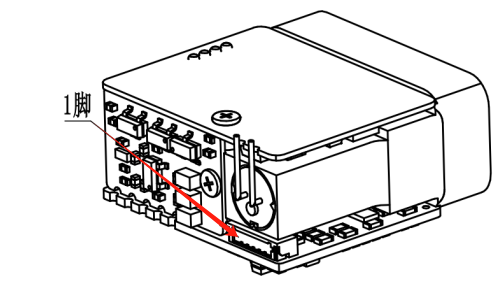
d) ปลายคอมพิวเตอร์ส่วนบนบรรลุการทดสอบการเชื่อมโยงข้ามด้วยตัวเชื่อมต่อเครื่องวัดระยะทางปลาย 0.8WTB-6AB-01 (Yueqing Huabao) ผ่านตัวเชื่อมต่อ 0.8WTB-6Y-2 คำจำกัดความของพินของแหล่งจ่ายไฟและพอร์ตการสื่อสารที่ปลายเรนจ์ไฟนเดอร์แสดงอยู่ในตารางที่ 1 และตำแหน่งพินของตัวเชื่อมต่อจะแสดงในรูปที่ 3
ดัชนีประสิทธิภาพผลิตภัณฑ์
| หมายเลขซีเรียล | ชื่อโครงการ | ระยะสูงสุด: 2000 ม |
| 1 | ความปลอดภัยของดวงตามนุษย์ | ใช่ |
| 2 | ความยาวคลื่นเลเซอร์ | 905 นาโนเมตร |
| 3 | มุมการเบี่ยงเบนของเลเซอร์ | 1×6ม |
| 4 | การรับขอบเขตการมองเห็น | ~20ม.ราด |
| 5 | เครื่องส่งสัญญาณขนาด | Φ10×7.5มม |
| 6 | รับความสามารถ | Φ15×10มม |
| 7 | ช่วงตั้งแต่ | 5~2000ม |
| 8 | ความแม่นยำตั้งแต่ | ±1ม |
| 9 | ความถี่ในการวัด | ช่วงช็อตเดียว, 1Hz, 2Hz |
| 10 | อัตราความแม่นยำ | ≥98% |
| 11 | อัตราการเตือนที่ผิดพลาด | ≤1% |
| 12 | อินเทอร์เฟซข้อมูล | UART (TTL_3.3V) |
| 13 | แรงดันไฟฟ้า | กระแสตรง 3~5V |
| 14 | การใช้พลังงาน | สแตนด์บาย: ≤0.6W@3.3V;งาน: ≤1W@3.3V; |
| 15 | ||
| 16 | ~20ม.ราด | 10±0.5ก |
| 17 | ขนาด (ยาว×กว้าง×สูง) | ≤26×25×13.5มม |
| 18 | อุณหภูมิในการทำงาน | -20~+60℃ |
| 19 | อุณหภูมิในการจัดเก็บ | -30~+60℃ |
| 20 | ช็อก | 1200กรัม, 1มิลลิวินาที |
| 21 | การสั่นสะเทือน | 5~50~5Hz, 1 อ็อกเทฟ/นาที, 2.5 ก |
| 22 | ความน่าเชื่อถือ | MTBF≥1500ชม |
| 23 | เวลาเริ่มต้น | หยุดการวัด |
| 24 | อินเตอร์เฟซไฟฟ้า | ซ็อกเก็ต: 0.8WTB-6AB-01ปลั๊ก: 0.8WTB-6Y-2 |
องค์ประกอบของโมดูล
ส่วนประกอบหลักของผลิตภัณฑ์เครื่องวัดระยะด้วยเลเซอร์มีดังนี้:
ก) การรับและส่งสัญญาณส่วนประกอบ
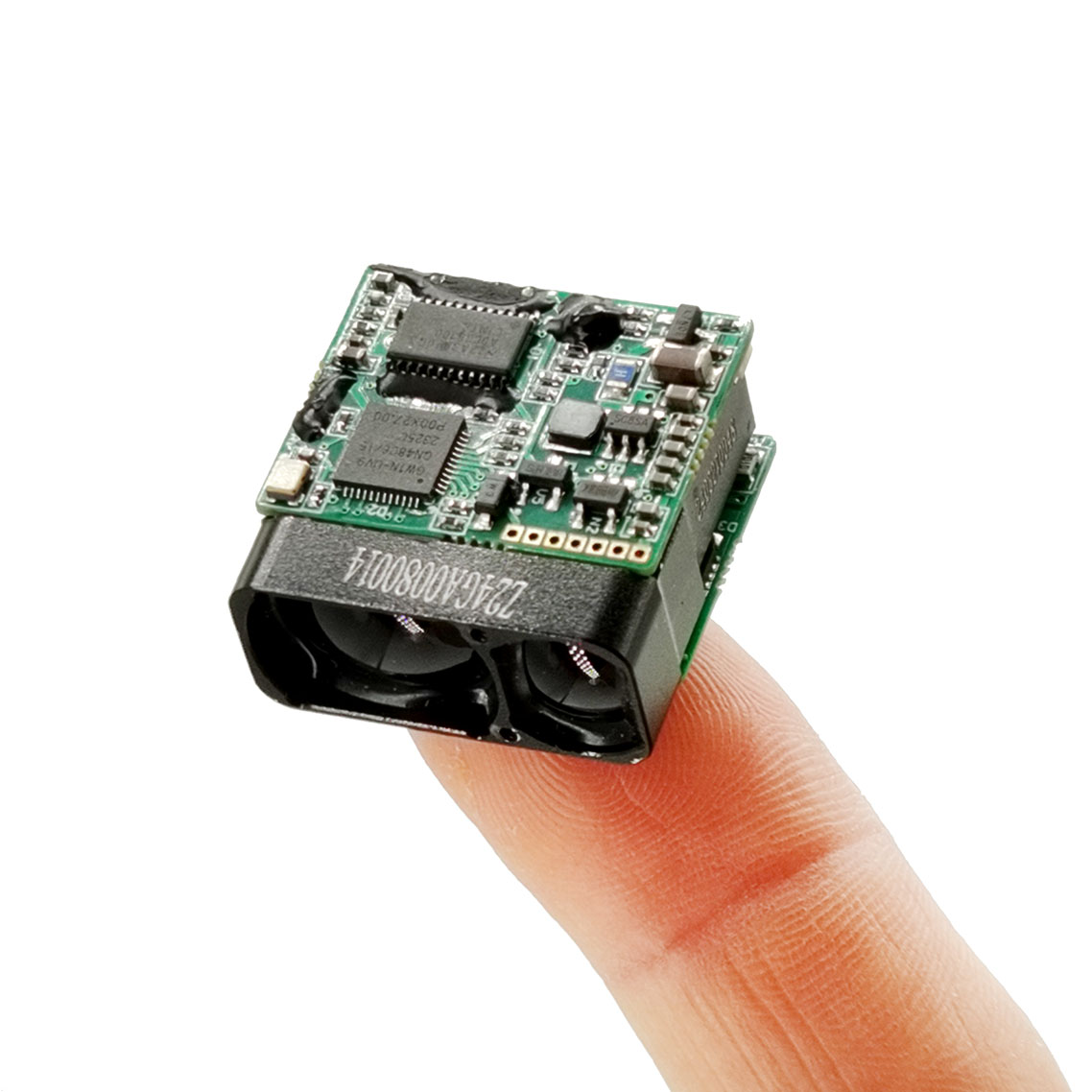
b) ส่วนประกอบของวงจร 26 มม. × 25 มม. × 13.5 มม. (L × W × H) น้ำหนักคือ ≤10g ± 0.5g และลักษณะที่ปรากฏจะแสดงในรูปที่ 1
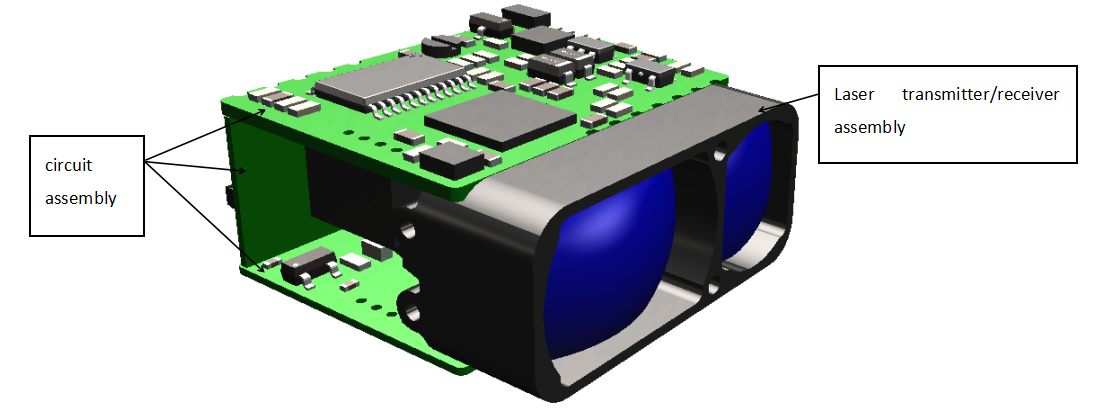
รูปที่ 1 ลักษณะของผลิตภัณฑ์
อินเทอร์เฟซการติดตั้งโครงสร้าง
ขนาดภายนอกของอินเทอร์เฟซทางกลและออปติคัลแสดงในรูปที่ 2
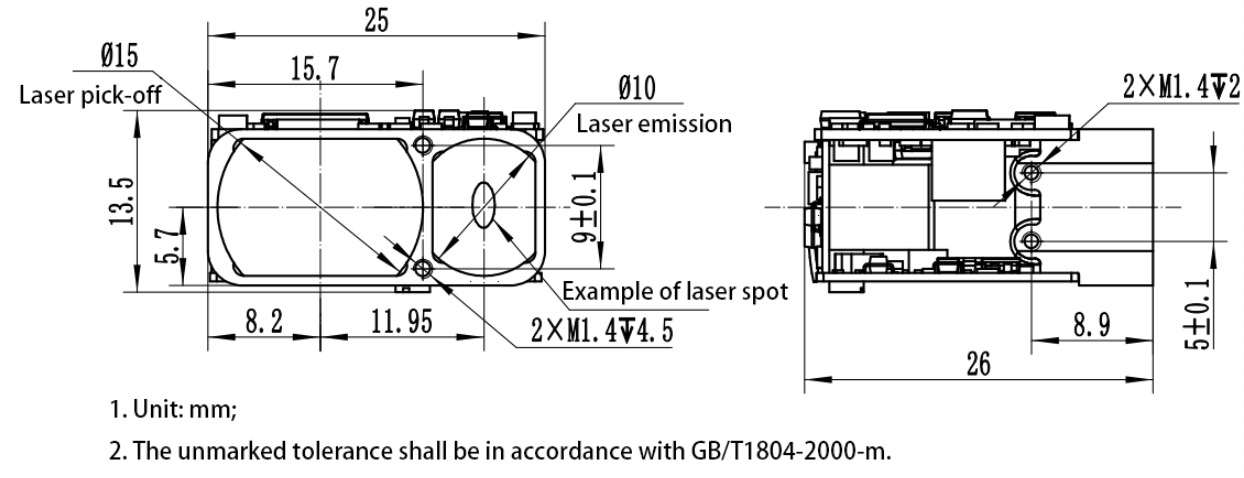
รูปที่ 2 แผนภาพอินเทอร์เฟซทางกลและออปติคอล
อินเตอร์เฟซไฟฟ้า
ก) แรงดันไฟฟ้า: 3V ~ 5.5V (ค่าปกติ 3.3V หรือ 5V);
ก) แรงดันไฟฟ้า: 3V ~ 5.5V (ค่าปกติ 3.3V หรือ 5V);
ข) การใช้พลังงานขณะสแตนด์บาย: ≤ 0.8W;
ค) การใช้พลังงานเฉลี่ย: ≤ 1W;
d) ปลายคอมพิวเตอร์ส่วนบนบรรลุการทดสอบการเชื่อมโยงข้ามด้วยตัวเชื่อมต่อเครื่องวัดระยะทางปลาย 0.8WTB-6AB-01 (Yueqing Huabao) ผ่านตัวเชื่อมต่อ 0.8WTB-6Y-2 คำจำกัดความของพินของแหล่งจ่ายไฟและพอร์ตการสื่อสารที่ปลายเรนจ์ไฟนเดอร์แสดงอยู่ในตารางที่ 1 และตำแหน่งพินของตัวเชื่อมต่อจะแสดงในรูปที่ 3
ตารางที่ 2 คำจำกัดความของพินไฟฟ้าของผลิตภัณฑ์
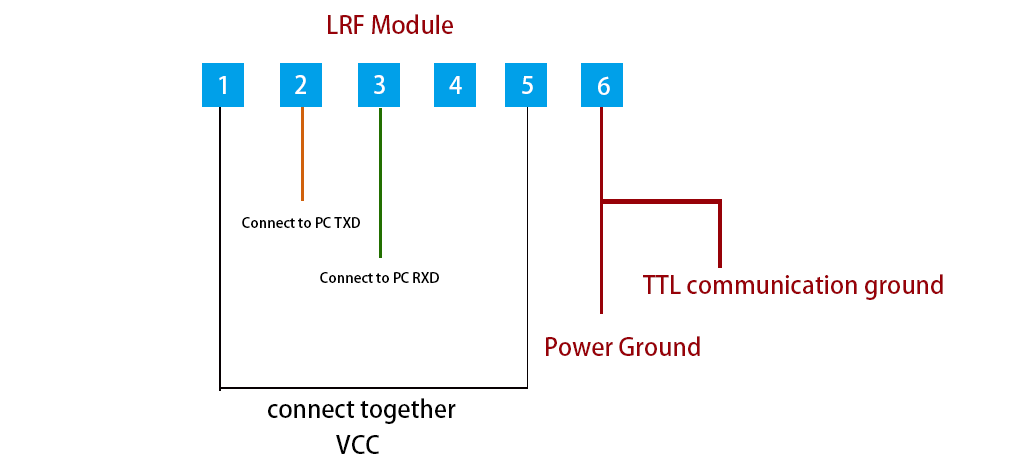
| เข็มหมุด | การติดฉลาก | นิยามลักษณะทางไฟฟ้า | ทิศทางของสัญญาณ |
| 1 | เพาเวอร์-EN | ||
| 2 | TTL_RXD | พอร์ตอินพุตสัญญาณ | โฮสต์คอมพิวเตอร์ไปยังเรนจ์ไฟนเดอร์ |
| 3 | TTL_TXD | พอร์ตสัญญาณออก | เรนจ์ไฟนเพื่อโฮสต์คอมพิวเตอร์ |
| 4 | เอ็นซี | ||
| 5 | พาวเวอร์ซัพพลาย+ | ||
| 6 | จีเอ็นดี |
แผนภาพการเชื่อมต่อไฟฟ้า
การสื่อสารโมดูล
ข้อมูล
อัตรารับส่งข้อมูล: 115200bps;
รูปแบบการส่งไบต์เดี่ยว: รวมถึง 1 บิตเริ่มต้น, 8 บิตข้อมูล, ไม่มีการตรวจสอบ, 1 บิตหยุด, ข้อมูล 8 บิตจะถูกส่งก่อนในระดับต่ำแล้วจึงส่งข้อมูลสูง
โปรโตคอล
คำสั่งช่วงเดียว
หมายเหตุ: ส่งรหัสยืนยัน = ไบต์ 3 + ไบต์ 4 + ไบต์ 5 + ไบต์ 6 + ไบต์ 7;
รหัสยืนยันที่ได้รับ = ไบต์ 1 + ไบต์ 2 + ไบต์ 3 + ไบต์ 4 + ไบต์ 5 + ไบต์ 6 + ไบต์ 7
ส่งไปยังโมดูลตั้งแต่
| ไบต์ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| คำอธิบาย | 0x55 | 0xAA | 0x88 | 0xFF | 0xFF | 0xFF | 0xFF | ตรวจสอบรหัส |
| ไบต์ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| คำอธิบาย | 0x55 | 0xAA | 0x88 | สถานะ | 0xFF | ข้อมูล_H | DATA_L | ตรวจสอบรหัส |
สถานะ=0 การวัดเดี่ยวล้มเหลว DATA_H=0xFF, DATA_L=0xFF; สถานะ=1 การวัดเดี่ยวสำเร็จ DATA_H=ผลการวัดไบต์สูง DATA_L=ผลการวัดไบต์ต่ำ
คำสั่งช่วงต่อเนื่อง
หมายเหตุ: ส่งรหัสยืนยัน = ไบต์ 3 + ไบต์ 4 + ไบต์ 5 + ไบต์ 6 + ไบต์ 7;
รหัสยืนยันที่ได้รับ = ไบต์ 1 + ไบต์ 2 + ไบต์ 3 + ไบต์ 4 + ไบต์ 5 + ไบต์ 6 + ไบต์ 7
ส่งไปยังโมดูลตั้งแต่
| ไบต์ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| คำอธิบาย | 0x55 | 0xAA | ความถี่ | 0xFF | 0xFF | 0xFF | 0xFF | ตรวจสอบรหัส |
| ไบต์ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| คำอธิบาย | 0x55 | 0xAA | ความถี่ | สถานะ | 0xFF | ข้อมูล_H | DATA_L | ตรวจสอบรหัส |
สถานะ=0 การวัดอย่างต่อเนื่องล้มเหลว DATA_H=0xFF, DATA_L=0xFF; สถานะ=1 การวัดต่อเนื่องสำเร็จ DATA_H=ไบต์สูงของผลการวัด; DATA_L=ไบต์ต่ำของผลการวัด
ความถี่ = 0x89,1Hz สำหรับช่วง; ความถี่ = 0xA9,2Hz สำหรับช่วง; ความถี่ = 0xB9,5Hz สำหรับช่วง; Freq=0xF9 สำหรับโหมดการสอบเทียบแกน (สถานะแกนจะถูกส่งกลับหนึ่งครั้งหลังจากได้รับคำแนะนำในการสอบเทียบแกน)
TTL_TXD
ส่งไปยังโมดูลตั้งแต่:
| ไบต์ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| คำอธิบาย | 0x55 | 0xAA | 0x8E | 0xFF | 0xFF | 0xFF | 0xFF | ตรวจสอบรหัส |
โมดูลช่วงผลตอบแทน:
| ไบต์ | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| คำอธิบาย | 0x55 | 0xAA | 0x8E | สถานะ | 0xFF | 0xFF | 0xFF | ตรวจสอบรหัส |
สถานะ=0 ไม่สามารถปิดการวัดต่อเนื่องได้ สถานะ = 1 ปิดการวัดต่อเนื่องได้สำเร็จ
หมายเหตุ: ข้อมูลจะถูกส่งกลับเป็นเลขฐานสิบหก และผลลัพธ์ข้อมูลทั้งหมดจะถูกส่งออกโดยการคูณข้อมูลจริงด้วย 10
ตัวอย่าง: dist=2000.3m ข้อมูลเอาต์พุตคือ 20003 ซึ่งแปลงเป็นเลขฐานสิบหกเป็น 4E23 นั่นคือ Data1=0x4E และ Data2=0x23
แท็กยอดนิยม: โมดูลเรนจ์ไฟเลเซอร์ขนาดเล็ก 2 กม. ผู้ผลิตผู้จำหน่ายโรงงานจีนผลิตในประเทศจีนกำหนดเองคุณภาพสูง
หมวดหมู่ที่เกี่ยวข้อง
โมดูลค้นหาระยะเลเซอร์ 905 นาโนเมตร
โมดูลค้นหาระยะเลเซอร์ 1535nm
โมดูลค้นหาระยะเลเซอร์ 1570nm
โมดูล Rangefinder เลเซอร์ 1.54um
ตัวออกแบบเป้าหมายเลเซอร์ 1064nm
โมดูลต่อต้านเสียงพึมพำ
โมดูล Lidar แบบต่างๆ
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง





")